XiaoMi-AI文件搜索系统
World File Search System干扰警报

疲劳和干扰检测技术(FDDT)
•5(a)对警报做出响应 - 主管响应模型•5(b)响应警报 - 主管响应模型•5(c)对警报响应 - 无主管监控 - 6(a)疲劳风险评估 - 进行事件审查 - 事件后审查 - 6(b)疲劳风险评估•6(c)疲劳•7(c)疲劳•8(c)疲劳•8(a)疲劳•8(A (b)标准操作程序 - 干扰警报•9(a)驾驶员讨论摘要 - 疲劳警报•9(b)驾驶员讨论摘要 - 干扰警报•10疲劳事件报告
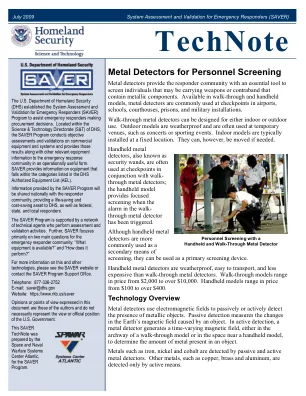
人员筛查金属探测器技术说明
为了适应现有的背景电磁场,大多数金属探测器在通电时都会自动校准。此外,大多数金属探测器的灵敏度都是可调的,以尽量减少误报和干扰警报的数量。随着误报或干扰警报数量的增加,吞吐量(定义为在给定时间段内扫描的人数)会降低。环境中的物体可能会发射或反射电磁场,从而导致误报。荧光灯、计算机显示器和结构钢就是一些可能造成干扰的物体。制造商已经采用了过滤硬件和软件来抑制或补偿电磁干扰。如有必要,改变检查点的位置可以减少某些干扰源(例如地板和墙壁中的结构钢)的影响。

关注安全网 - SKYbrary
一半的 STCA 警报都是由于没有 C 模式数据的航迹而产生的干扰警报,主要是由于系统航迹在雷达覆盖区域边缘附近间歇性地失去 C 模式高度。在当前系统中,航迹与飞行计划不相关,也没有 C 模式数据,STCA 假设飞机从地面开始占据所有飞行高度,并认为这是干扰警报的根本原因(当航迹相关时,这不是问题,因为 STCA 使用许可飞行高度 (CFL))。其他观察结果包括从分离航迹生成或在飞机航迹滑行时生成的虚假 STCA 警报(即在缺少绘图数据的情况下推断系统航迹)。

mstar - radartutorial.eu
V6 优势 • MSTAR V6 专为恶劣环境下的集成应用而设计 – 全天候连续运行 – 单一操作模式 - 监视 – 2 倍目标更新率,连续监视范围为 100 米至 27 千米,是同类系统中的最高速率 – 通过更多自动化减少操作员控制 – 支持 IP,便于集成 – 新型数字无线电技术 • 最先进的信号处理能力 – 新型算法显著 (10 倍) 改善了干扰警报抑制。– 允许扫描管理干扰警报率。• 与所有当前集成的 MSTAR 应用程序兼容 – TASS 变体 – G-BOSS 变体 – BETSS-C 系统 – – FPS – – RAID – – Cerberus 变体 – SBInet – MSS、MSC • 微波和万向节部分可靠性得到验证 – 扩展频率选择 (6) – 与现有的 JF12 和 FCC 许可证兼容 • 保留关键的 MSTAR 特性 – 功耗、接口协议 – 安装接口、扫掠体积、重量 • 后勤支持不变 – 培训、仓库维护、操作员手册

疲劳和干扰检测技术(FDDT)
用法和监视21疲劳和干扰警报之间是否存在差异?对驾驶员的响应22触发驾驶员的风险23驾驶员对驾驶员的响应23我应该如何管理误报,我应该如何使用24号法律?审核我的FDDT 25使用FDDT数据来改善疲劳管理26
UFGS 28 10 05 电子安全系统 (ESS)
2.1 系统描述 2.2 性能要求 2.2.1 增长能力 2.2.2 危险场所 2.2.3 网络认证 2.2.4 可维护性 2.2.5 可用性 2.2.6 故障安全能力 2.2.7 线路监控 2.2.8 断电检测 2.2.9 控制和指定 2.2.10 特殊测试设备 2.2.11 电磁干扰 (EMI) 2.2.12 电磁辐射 (EMR) 2.2.13 互换性 2.3 入侵检测系统 (IDS) 2.3.1 IDS 组件 2.3.2 检测灵敏度 2.3.3 检测警报和报告能力 2.3.4 误报率 2.3.5 干扰警报率 2.3.6 场所控制单元 (PCU) 2.3.6.1 PCU 功能 2.3.6.2 过流保护和指示 2.3.6.3 手动和自检 2.3.7 检测传感器 2.3.7.1 内部传感器 2.3.7.1.1 高安全性平衡磁开关 (BMS) 2.3.7.1.1.1 1 级开关 2.3.7.1.1.2 2 级开关 2.3.7.1.2 玻璃破碎检测 2.3.7.1.2.1 窗式玻璃破碎冲击传感器 2.3.7.1.2.2 天花板或壁挂式双技术玻璃
DOT HS 810 697 2007 年 1 月碰撞警告系统界面:人为因素洞察和经验教训最终报告
16. 摘要 本项目的目标是为强调驾驶员表现和安全性的碰撞警告装置提供人为因素见解和经验教训。该项目反映了与有效实施碰撞警告系统界面相关的人为因素文献的重要回顾;从这些文献中吸取的经验教训在界面设计和驾驶员表现指南方面具有特色。本文件旨在强调要解决的问题并为碰撞警告系统 (CWS) 的开发提供指导;此处提供的指南反映了最佳的人为因素信息,既不是要求也不是强制要求。信息涵盖了与 CWS 设备的驾驶员-车辆界面 (DVI) 相关的各种主题。第 2 章至第 11 章包含通过这项工作产生的设计指南。第 2 章提供了 CWS 设计的一般指南,重点介绍了与警告级别和警告优先级相关的问题,以及防止误报和干扰警报的建议。第 3 章提供了呈现听觉警告的指南,重点介绍了各种听觉警告选项的选择和设计,包括简单音调、耳标、听觉图标和语音消息。第 4 章提供了视觉警告指南,重点介绍了使用视觉显示的建议以及如何确定最合适的视觉显示。第 5 章提供了触觉警告指南,重点介绍了使用触觉显示的建议以及如何确定最合适的触觉警告。第 6 章提供了一组用于选择和设计 CWS 设备用户控件的指南。第 7、8 和 9 章分别提供了前方碰撞(车距警告)、车道变换(盲点警告)和道路偏离警告的指南;这些章节中的每一章都提供了开发警示和即将发生警告的指导,以及针对视觉、听觉和触觉警告的设备特定指导。第 10 章提供了一系列针对重型卡车和公共汽车应用的指南。
DOT HS 810 697 2007 年 1 月碰撞警告系统界面:人为因素洞察和经验教训最终报告
16. 摘要 本项目的目标是为强调驾驶员表现和安全性的碰撞警告装置提供人为因素见解和经验教训。该项目反映了与有效实施碰撞警告系统界面相关的人为因素文献的重要回顾;从这些文献中吸取的经验教训在界面设计和驾驶员表现指南方面具有特色。本文件旨在强调要解决的问题并为碰撞警告系统 (CWS) 的开发提供指导;此处提供的指南反映了最佳的人为因素信息,既不是要求也不是强制要求。信息涵盖了与 CWS 设备的驾驶员-车辆界面 (DVI) 相关的各种主题。第 2 章至第 11 章包含通过这项工作产生的设计指南。第 2 章提供了 CWS 设计的一般指南,重点介绍了与警告级别和警告优先级相关的问题,以及防止误报和干扰警报的建议。第 3 章提供了呈现听觉警告的指南,重点介绍了各种听觉警告选项的选择和设计,包括简单音调、耳标、听觉图标和语音消息。第 4 章提供了视觉警告指南,重点介绍了使用视觉显示的建议以及如何确定最合适的视觉显示。第 5 章提供了触觉警告指南,重点介绍了使用触觉显示的建议以及如何确定最合适的触觉警告。第 6 章提供了一组用于选择和设计 CWS 设备用户控件的指南。第 7、8 和 9 章分别提供了前方碰撞(车距警告)、车道变换(盲点警告)和道路偏离警告的指南;这些章节中的每一章都提供了开发警示和即将发生警告的指导,以及针对视觉、听觉和触觉警告的设备特定指导。第 10 章提供了一系列针对重型卡车和公共汽车应用的指南。
DOT HS 810 697 2007 年 1 月碰撞警告系统界面:人为因素洞察和经验教训最终报告
16. 摘要 本项目的目标是为强调驾驶员表现和安全性的碰撞警告装置提供人为因素见解和经验教训。该项目反映了与有效实施碰撞警告系统界面相关的人为因素文献的重要回顾;从这些文献中吸取的经验教训在界面设计和驾驶员表现指南方面具有特色。本文件旨在强调要解决的问题并为碰撞警告系统 (CWS) 的开发提供指导;此处提供的指南反映了最佳的人为因素信息,既不是要求也不是强制要求。信息涵盖了与 CWS 设备的驾驶员-车辆界面 (DVI) 相关的各种主题。第 2 章至第 11 章包含通过这项工作产生的设计指南。第 2 章提供了 CWS 设计的一般指南,重点介绍了与警告级别和警告优先级相关的问题,以及防止误报和干扰警报的建议。第 3 章提供了呈现听觉警告的指南,重点介绍了各种听觉警告选项的选择和设计,包括简单音调、耳标、听觉图标和语音消息。第 4 章提供了视觉警告指南,重点介绍了使用视觉显示的建议以及如何确定最合适的视觉显示。第 5 章提供了触觉警告指南,重点介绍了使用触觉显示的建议以及如何确定最合适的触觉警告。第 6 章提供了一组用于选择和设计 CWS 设备用户控件的指南。第 7、8 和 9 章分别提供了前方碰撞(车距警告)、车道变换(盲点警告)和道路偏离警告的指南;这些章节中的每一章都提供了开发警示和即将发生警告的指导,以及针对视觉、听觉和触觉警告的设备特定指导。第 10 章提供了一系列针对重型卡车和公共汽车应用的指南。