XiaoMi-AI文件搜索系统
World File Search System底部
无表层圆柱形电池 – 免费指南
它们各有利弊:- 扭转超声波焊接的焊接工具使用寿命较短。如果 JR 高度增加,焊接工具(喇叭/超声波发生器)的设计将变得更加复杂,以保持高可靠性:薄型设计刚度较差,导致焊接效率低下。- 由于焊接元件为纯铝合金,点电阻焊接可能会出现粘连问题。- 激光焊接:很难将激光束聚焦到 JR 内径。一些电池制造商正在研究不同的设计,允许从底部焊接(激光束从底部的外侧击中阴极端子)

糖尿病患者的治疗鞋
o ffse高跟鞋:这是一个脚跟法兰,是中间,侧面,或一个组合,然后将其向上延伸至鞋子,以稳定后足的极端位置。r igid摇杆底部:这些是从脚后跟的后端测得的51%至75%距离的顶部位置。顶点是解剖结构的狭窄或尖端。顶点必须位于meta骨头后面,并急剧逐渐缩小到鞋底的前端。APEX高度有助于消除MetaTarsal头部的压力。鞋子中的钢可确保刚性。鞋子的脚后跟在后背倾斜,以使脚跟在脚后跟中间撞击。r oller底部(鞋底或棒):这些与摇滚底部相同,但是脚跟从顶端到鞋底的前端逐渐变细。w边缘(张贴):楔形是后脚,前脚或两者兼而有之,也许是在中间或侧面。该功能是在站立或移动期间转移到另一侧时移动或转移重量,以增加支撑,稳定均衡的重量分布或平衡。


通过高光谱数据检索非常浅的水域水深
以及其他水体特性已使用光谱查找表 [7] 进行处理,其中前向辐射传输模型(如 Hydrolight [8])会针对不同的水柱特性、深度和底部类型重复执行。为了全面起见,这些查找表必须很大,并且可能需要针对特定的海岸类型进行调整,因为底部类型和水特性可能会因海岸类型而有很大差异。高光谱数据的一个吸引人的特征是,除了水深测量检索之外,它还能够同时满足多种用途。光检测和测距 (LIDAR) 也被广泛用于检索水深测量数据。LIDAR 的优势在于它是一种主动传感器,可以在较深的水域提供更高的精度,但是,与典型的机载高光谱传感器相比,诸如扫描水文作业机载激光雷达调查 (SHOALS) [4] 之类的 LIDAR 系统必须在非常低的高度飞行,并且扫描范围相对较小。在非常浅的水域(深度小于 2 米)中,LIDAR 系统通常无法提供可靠的检索,无法解决底部和表面回波之间的差异。在本文中,我们专注于这种非常浅的水域,特别是从可以假设相对简单的反射模型的光谱范围中检索水深。与可见光波长的反射率相比,必须仔细考虑水柱的所有贡献,近红外波长反射率(800nm 以上)主要取决于水的吸收率和深度,以及底部反射率,水柱成分起次要作用。
2023 年企业公民报告
提供超过 450 种 ENERGY STAR® 产品。作为我们向全球变暖潜能值较低的制冷剂和泡沫过渡的努力的一部分,我们 100% 的窗式空调和除湿机都从 R-410-a 过渡到 R-32。我们还将我们的几款商用空调产品(包括所有 26 英寸和 24 英寸内置 PTAC 产品和我们的 Hotpoint PTAC)过渡到 R-32。此外,我们停止在田纳西州塞尔默工厂生产含有 R-134a 的 Monogram 底部冷冻机,并开始生产使用 GWP 值较低的制冷剂 R-600a 的新型集成底部冷冻机。
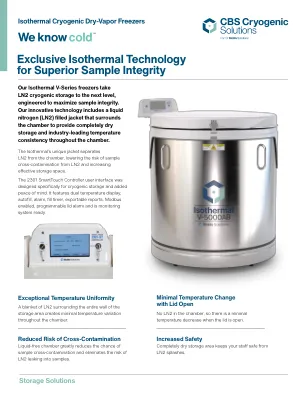
卓越样本完整性的独家等温技术
尖端的外套技术比传统的LN2冰柜提供更多的存储空间,因为腔室底部没有LN2。传统的LN2冰柜在底部至少有六英寸的LN2。快速示例访问宽盖开口或旋转木马型号上的方盖开口使您可以轻松访问所有样品,而无需卸下架子才能找到所需的架子。各种尺寸和样式是您需要开放的盖子开口还是较小的型号,其旋转木马设计用于天花板限制,都可以轻松地访问样品。

基于NSGA-III算法的罐底液压成形工艺参数优化
2. 上海航天设备制造有限公司,上海 200245) 摘要:液压胀形工艺可以实现大型储罐底部的整体成形,但其质量受诸多工艺参数的影响。针对整体储罐底部液压胀形过程中出现的起皱、开裂缺陷,建立了以预胀压力、液压压力、压边力、压边圆角半径等工艺参数为优化目标的多目标优化模型。基于有限元仿真,利用Kriging技术建立工艺参数与质量标准之间的代理模型。采用NSGA-III算法,在储罐底部达到壁厚变化量最小、断裂趋势最小、翻边皱褶最小、皱褶趋势最小等目标的条件下,确定最优工艺参数。与粒子群优化(PSO)算法相比,NSGA-III算法更适合求解该优化问题。通过仿真实验验证了该方法的有效性和结果的准确性。关键词:储罐·液压成形·克里金法·NSGA-III