XiaoMi-AI文件搜索系统
World File Search System弹簧常数
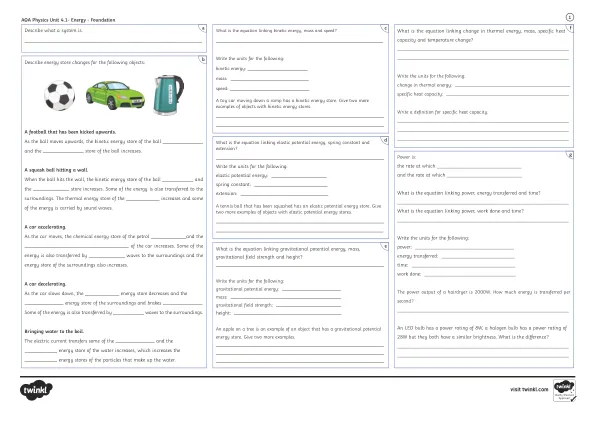
AQA物理单元4.1-能量 - 基础1
扩展?弹性势能= x弹簧常数x(扩展)2写下以下单元:弹性势能:(e e),焦耳,j弹簧常数:(k),每米newtons,每米,n/m扩展:(e),meters,m

带螺旋弹簧叉的 3D 可打印干式脑电图电极
摘要:已经开发了各种干式脑电图 (EEG) 电极。干式 EEG 电极需要压在头皮上;因此,需要在保持低接触阻抗和保持舒适度之间进行权衡。我们提出了一种通过使用立体光刻 3D 打印机打印复杂形状的电极来解决这种权衡的方法。为了证明我们的方法的可行性,我们制作了带有弹簧的柔性手指(叉)的电极。虽然已经提出了带有柔性叉的干电极,但尚未获得合适的弹簧常数。在本研究中,我们电极的弹簧常数是根据电极和头皮之间的接触模型确定的。发现电极的机械性能和再现性足够。最后,我们测量了参与者使用我们的电极睁开/闭上眼睛时的 alpha 波。

评论 - 国家物理实验室
测量纳米级表面力的难点在于,要知道悬臂尖端在给定偏转下对样品的压力有多大。这需要知道悬臂的弹簧常数——它在力的作用下弯曲的程度。NPL 的解决方案是使用参考弹簧,可以将 AFM 的悬臂与它进行比较。直径为十分之一毫米的电容器具有下部固定板和上部板,上部板的作用类似于承载小重量的小弹簧。施加到其中一个板上的电流会导致这对板相对于固定板上下移动。通过测量板之间的泄漏电流并使用光学干涉仪监测位移,可以计算出弹簧常数,而无需了解电容器几何形状的细节。这将使 NPL 能够开发一项新服务,在泰丁顿提供光学校准,并使该技术在场外可用于校准 AFM 悬臂。

标准量子限制以下的热噪声测量
第2章。光弹簧效果。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。22 2.1。理想化的光弹簧。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。22 2.2。完整的光弹簧常数和阻尼系数。。。。。。。。。。。。。。25 2.3。机械敏感性和光弹簧增益。。。。。。。。。。。27 2.4。光弹簧对激光功率波动的响应。。。。。。。。。。。31 2.5。。使用计算模型模拟量子光场的量子反作用噪声消除量子。。。。。。。。。。。。。。34


通过实验分析验证胡克定律
2.8.汽车应用 在汽车行业,胡克定律的原理应用于悬架和减震器的设计。预测弹簧在负载下如何压缩和伸展的能力对于车辆性能和安全性至关重要。例如,悬架系统的调整涉及调整各种部件的弹簧常数以实现所需的乘坐质量和操控特性 [7]。2.9.生物医学设备 此外,在生物医学领域,胡克定律适用于假肢和矫形器的设计。了解材料在人体施加的力量下的表现,可以创造出既实用又舒适的设备。研究表明,加入符合胡克原理的弹性材料可以提高这些设备的性能,改善患者的治疗效果 [8]。

主题索引 - ASTM International
声波,536-546 衍射和模式转换信号,541-542 分布弹簧常数,539-541 与裂纹的相互作用,536-537 界面透射率,539,541 局部应力强度因子,543-546 通过透射和衍射信号接收,537-538 界面残余应力,542-543 剪切波信号,542 超声波穿过裂纹的传播,539-540 垂直于裂纹表面的波传播,538--541 艾里应力函数,313 合金,139,171 铝合金,121,270,528,583-597,640,642-643 施加与有效试样几何形状,227-228 基线传播数据,571-572 化学成分, 122,584 顺应性方法,587 恒定载荷振幅试验,569-570 裂纹扩展基线数据,428-430 速率变化,37-38 裂纹张开应力强度因子变化,37-38

集体变形模式促进纤维自...
在本节中,我们给出了简单(非随机)离散粒子模型与连续模型的参数之间的关系。前者有三个参数:两个弹簧常数 k 和 kc ,以及面积刚度 k area 。该模型的连续极限包括两个耦合的弹性片,分别对应于正文图 2 中的黄色和红色,我们分别用 ↑ 和 ↓ 符号表示。我们用剪切模量 µ 和泊松比 ν 表示每片的弹性。薄片之间的弹性耦合由耦合常数 κ c 参数化。这里我们根据 k 、 kc 和 k area 确定 µ 、 ν 和 κ c 。我们首先将离散粒子模型中单个三角弹簧网络的能量映射到连续模型中单个薄片的能量上。相应的连续薄片能量密度为
用于快速抗生素和抗真菌性敏感性测试的基于光纤的纳米纤维传感器
摘要:抗生素和抗真菌性抗性微生物的出现代表了当今的一个主要公共卫生问题,可能将人类推向抗生素/抗真菌时代。避免这种灾难的方法之一是提高快速的抗生素和抗真菌敏感性测试。在这项研究中,我们提出了一个紧凑的基于光纤的纳米动力传感器,通过监测与微生物生存能力相关的悬臂的动态纳米级振荡来实现此目标。实现了高检测灵敏度,这归因于弹性两光子聚合悬臂,弹簧常数为0.3 n/m。这种纳米动力装置在大肠杆菌和白色念珠菌的易感性测试中表现出色,并在几分钟的时间范围内快速响应。作为概念验证,具有简单的使用和并行化的潜力,我们的创新传感器预计将成为未来快速抗生素和抗真菌敏感性测试和其他生物医学应用的有趣候选者。关键字:光纤传感器,纳米动力设备,抗生素/抗真菌敏感性测试,两光子聚合