XiaoMi-AI文件搜索系统
World File Search System怠速

ELANTRA - Birchwood 汽车集团
性能特点:• Smartstream 2.0L MPI Atkinson 四缸发动机• Smartstream 智能无级变速器,带驱动模式选择• 发动机怠速停止和启动*• 四轮盘式制动器• 临时紧凑备胎外部特点:• 15 英寸合金轮毂• 带 LED 日间行车灯的投影大灯• 自动大灯• 带警报的遥控无钥匙进入• 太阳能前后玻璃• 加热车身颜色后视镜• 黑色前格栅内部特点:• 8.0 英寸触摸屏显示器,带无线 Apple CarPlay™ Δ 和 Android Auto™ ◊• AM/FM/MP3/HD 音响系统,带 4 个扬声器• 带语音识别的蓝牙® 免提电话系统• 加热前排座椅• 空调• 6 向手动可调驾驶员座椅• 4 向手动可调前排乘客座椅• 4.2 英寸 LCD 仪表盘显示屏• 带驾驶员自动下降功能的电动车窗• 双 USB 插座• 电动门锁• 地图、车顶和后备箱灯安全特点:• 前进带行人检测的防撞辅助系统 • 带车道保持辅助的车道偏离预警系统 • 车道跟随辅助系统 • 远光灯辅助系统 • 驾驶员注意预警系统 • 后排乘客预警系统 • 轮胎压力监测系统 • 带动态指引的后视摄像头 • 安全气囊(6 个)– 驾驶员(1 个)、前排乘客(1 个)、驾驶员和前排乘客侧面碰撞(2 个)、前/后侧面碰撞窗帘(2 个) • 巡航控制(安装在方向盘上)

安全性 可靠性 生产力 - 小松澳大利亚
• 空调/加热器除霜器(过滤和加压) • 气罐放气系统 • 可调节自动提升高度切断 • 自动铲斗调平控制 • 倒车声音警报 • 电池断开开关 • 提升臂和铰接锁 • 刹车灯 • 中央服务 • 数据分析和查看软件 • 数据记录 - 可下载的生产和维护日志 • 驾驶室门联锁 • 带牵引点的牵引杆 • 电喇叭 • 紧急停止按钮(驾驶室和遥控器安装) • 灭火器,手动,20 磅(9.07 千克) • FOPS - 落物保护系统 • 怠速计时器 • 内部灯 • 隔离监视器 • 操纵杆提升和铲斗控制 • 操纵杆转向控制 • 跳跃启动 • 紧急转向 • LED 工作灯 • LINCS II 警报 • LINCS II 负载称重和监控 • 操作员座椅(11 向可调) • 超速警报 • 停车制动器 • 可伸缩四点式肩带 • ROPS - 翻滚保护结构 • 可选油门开关 • 起动器断开开关 • 安全玻璃整个驾驶室 • 转向信号 • 驾驶室内 12VDC 电源 • 12VDC 电源端口 (2) • 挡风玻璃清洗器储液罐 9.8 L • 挡风玻璃雨刷和清洗器(所有驾驶室玻璃) • 自动润滑系统 • 手册:操作员、零件(Link One)、维护和维修 • 动能存储系统 (KESS) • 集成底部保护系统 • 颜色编码和标签的起重点
AMD 标准化测试方法 - nasemso
S4.2 病房声级测试期间应执行以下步骤: 1. 使用符合 ANSI S1.4《声级计规范》要求的仪表测量声级,对于 II 型仪表,将仪表设置为 A,以获得加权网络,“快速”仪表响应。 2. 将麦克风悬挂在车辆地板上方 23 英寸(584 毫米)处,横向和纵向位于病床的预期中心,因为它将固定在病房中。 3. 将救护车停放在混凝土或沥青路面上,停放位置应确保在被测车辆 50 英尺(15.2 米)范围内没有较大的反射面,例如其他车辆、招牌、建筑物或小山。 4. 关闭救护车所有门、窗和通风口。 5. 以最高速度运行病房内的空调和暖气鼓风机。 6. 将车辆变速器置于空档,并将发动机转速设置为救护车在平地以 55 英里/小时(88 公里/小时)的速度行驶时的转速。 7. 打开所有警告灯。 8. 将警报器调至最大音量模式。 9. 测量并记录最高声级。 10. 将发动机转速降低至怠速,然后降低至 55 英里/小时(88 公里/小时)的转速。 11. 测量并记录最高声级。 12. 重复操作,直到记录到两个最大声级,相差 2 分贝 (dB) 以内。 13. 对这两个最大声级读数取平均值。
利用 GPS 跟踪减少燃料消耗的五种方法
简介 车队管理技术正在改变车队经理看待车辆燃油消耗的方式。每个车队,无论大小,都必须支付燃油费用。挑战在于以最有效的方式消耗燃油。随着燃油成本不断上升,企业主和车队经理寻求经济有效的方法来管理这笔不可避免的开支。GPS 车队跟踪技术可能是管理燃油消耗最具成本效益的方法之一。配送、分销和运输服务行业的利润率下降和激烈的竞争使得每个企业都迫切需要实施有效的车队管理系统,以管理成本并提供可衡量的投资回报率 (ROI)。C. J. Driscoll & Associates 最近进行的一项研究报告称,配备 GPS 跟踪的本地车队车辆数量在过去四年中几乎翻了一番,从 920,000 辆增加到 1,173,000 多辆。报告指出,这一市场增长的最重要原因是车队运营商对 GPS 车队管理解决方案的高投资回报率的认识和接受度显著提高。以下是 GPS 车队管理技术可帮助您降低车队燃料成本的五种方式: 1.最大限度地减少发动机怠速时间 2.监控速度 3.优化路线 4.保持准确的记录 5.主动车辆维护 2010 年 9 月

在混合硅BTO平台中生成光子对
使用图1中描述的设置用于表征此混合平台中的光子生成过程。用带宽为0.52 nm的脉冲激光器以1550.97 nm为中心,脉冲宽度为1 ps,用Erbium-poped纤维放大器(EDFA)放大,为此过程产生强泵。然后通过变量光衰减器(VOA)通过,以使功率完全可调至-60 dB,而无需更改脉冲特性。使用≥80dB的组合抑制带抑制的两个密度波长多路复用器(DWDM)过滤器,用于从进入信号和惰轮收集带宽的激光器中消除泵噪声。将它们放置在极化控制器之前,以优化插入的光,以用于设计光栅耦合器的TE极化。a 99:1梁分离器允许通过安装在探针站的一个臂上的V型槽光纤阵列来监视所测试设备的功率(DUT)。从探测站输出后,使用多通道DWDM模块驱动信号和惰轮频率并拒绝泵。然后将一个额外的单通道DWDM放在信号和怠速通道上以进行额外过滤。芯片后这种过滤还为每个通道提供了≥80dB的排斥带抑制。最后,将两个通道通过光纤网络路由到两个连接到时间间隔分析仪(TIA)的光子柱超导纳米线单光子探测器(SNSPD)。

智能采煤机器人关键技术
摘 要: 采煤机是综采工作面的核心装备,研发智能采煤机器人是实现综采工作面智能化的关键。 综合分析当前采煤机机器人化研究进程中的传感检测、位姿控制、速度控制、截割轨迹规划与跟 踪控制等技术的研究现状,提出研发智能采煤机器人必须破解的 “ 智能感知、位姿控制、速度控制、 截割轨迹规划与跟踪控制、位 − 姿 − 速协同控制 ” 五大关键技术,并给出解决方案。针对智能感知 问题,提出了构建智能感知系统思路,给出了智能采煤机器人智能感知系统的架构,实现对运行 状态、位姿、环境等全面感知,为智能采煤机器人安全、可靠运行提供保障;针对位姿控制问题, 提出了智能 PID 位姿控制思路,给出了改进遗传算法的 PID 位姿控制方法,实现了智能采煤机器 人位姿精准控制;针对速度控制问题,提出了融合 “ 力 − 电 ” 异构数据的截割载荷测量思路,给出 了基于神经网络算法的截割载荷测量方法,实现了截割载荷的精准测量;提出牵引与截割速度自 适应控制思路,给出了人工智能算法牵引与截割速度决策方法和滑模自抗扰控制的牵引与截割速 度控制方法,实现了智能采煤机器人速度精准自适应控制;针对截割轨迹规划与跟踪控制问题, 提出了截割轨迹精准规划思路,给出了融合地质数据和历史截割数据的截割轨迹规划模型,实现 了截割轨迹的精准规划;提出了截割轨迹精准跟踪控制思路,给出了智能插补算法的截割轨迹跟 踪控制方法,实现了智能采煤机器人截割轨迹高精度规划与精准跟踪控制;针对 “ 位 − 姿 − 速 ” 协同 控制问题,提出了 “ 位 − 姿 − 速 ” 协同控制参数智能优化思路,给出了基于多系统互约束的改进粒子 群 “ 位 − 姿 − 速 ” 协同控制参数优化方法,实现了智能采煤机器人智能高效作业。深入研究五大关键 技术破解思路,有利于加快推动研发高性能、高效率、高可靠的智能采煤机器人。

Microsoft Word - 主动差速齿轮箱驱动的多功能高升力系统分析 - v3d0.docx
摘要 进行了飞行动力学评估,以分析使用外襟翼进行滚转控制的能力。根据空客 A350 襟翼系统架构,外襟翼可以通过使用所谓的主动差动齿轮箱 (ADGB) 独立于内襟翼展开,两种不同的概念被认为可能有利于实现预期目的。在这两种概念中,为了减轻重量和降低系统复杂性,都拆除了内副翼,外襟翼与外(低速)副翼一起执行(全速)滚转控制。概念 1 包括通常的襟翼几何形状和外副翼,而概念 2 包括外襟翼,其沿翼展方向延伸了内副翼的长度。在所呈现的分析中未考虑滚转扰流板。飞行动力学评估表明,为了满足认证规范 CS-25 和操纵质量标准的要求,襟翼偏转率至少需要达到 16°/s。系统分析表明,现有 ADGB 仅能使襟翼以最大速率 0.43°/s 偏转,或略作修改后为 1.4°/s 偏转 _____________________________________________

位于葡萄牙亚速尔群岛皮库岛的欧洲波浪能试验工厂。第二阶段:设备
通过将能量转换链分成两个单独建模的部分,对发电厂的性能进行了数字模拟:(I)波浪到气动能量转换;(II)气动到电能转换。模型 I 基于线性水波理论,使用在里斯本国家土木工程实验室(比例 1:35)和科克大学(比例 1:25)不规则波浪盆中进行的模型测试结果作为输入数据(这些模型测试是在第一阶段合同 JOU2-CT93-0314 的框架内进行的)。模型 II 模拟了 Wells 涡轮机和发电机中的能量转换,并包括受控泄压阀(旁通阀)的影响。Wells 涡轮机的气动性能基于涡轮机模型测试的实验数据(可从之前在里斯本进行的实验室工作中获得)。假设涡轮机有实际的机械损耗,发电机也有机械和电气损耗。控制转速(以匹配波浪功率水平)的能力已得到适当建模。通过亚速尔群岛施工现场的 44 条波浪测量记录及其发生频率模拟了当地波浪气候。为了优化涡轮机规格,对涡轮机额定功率和涡轮机阻尼系数的不同组合进行了模拟。根据这些结果,做出了决定
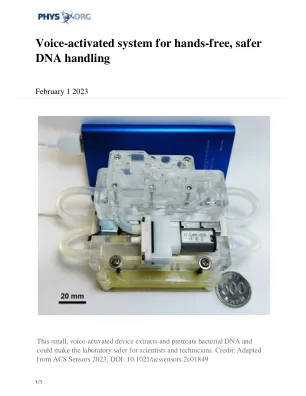
新芯片以轻速无权手动,更安全的DNA处理的语音激活系统
使用含有病原体样本的科学家需要与最小的可能造成的量,以避免意外感染。和对于高度传染性的细菌疾病,现场样品分析是快速诊断的理想选择。此外,患有视觉或其他身体障碍的科学家可能会发现很难操作复杂的仪器,尤其是那些专为微小体积而设计的仪器。通过语音命令快速运行的免提设备可以使此过程更轻松,更安全。因此,Tae Seok Seo及其同事希望将语音识别应用与微型提取系统相结合,以做到这一点。