XiaoMi-AI文件搜索系统
World File Search System总预算
欧盟财政总预算草案...
计划声明报告了欧盟预算运营支出的有效实施情况。今年,该报告首次跨越了两个不同的多年期财政框架 (MFF) 的实施:报告介绍了截至 2021 年底(2021-2027 多年期财政框架的第一年)取得的成果,还包括 2014-2020 年部分计划的成果,这些计划的大量付款仍在实施中。确实需要强调的是,不仅欧盟通过政策继续对 MFF 进行预算干预,而且许多欧盟计划的生命周期都比 7 年的 MFF 期限长。这意味着 2014-2020 年计划的预算实施将在 2021-2027 年 MFF 期间继续进行。这方面的例子包括为基础设施项目或其他投资提供资金的计划,这些计划的结果需要时间才能实现。本文件还努力将重点放在这些长期投资计划上,因为它们为未来在其领域的决策提供了重要的经验教训。因此,预算执行、绩效和指标部分针对 2021-2027 年计划和选定的 2014-2020 年计划进行了介绍。另一方面,两个时期的主要成就也一并呈现。
能量和能力预算-2023-24。 ...
在FY2022-23中,BDT 26,066千万分配给了能源和电力部门,占总预算的3.8%(图1)。此分配后来被修订到BDT 27,190亿卢比,占20022 - 23财年修订的总预算的4.1%(图1)。展望2023 - 24财年的预算,能源和电力部门的分配是34,81.9亿卢比,相当于总预算的4.6%(图1)。值得注意的是,与经修订的预算相比,与预算相比,与预算的预算相比,该财政量为2023-24中的能源和电力部门的分配显着增长了33.6%,而预算的预算为28.1%(图1)。值得一提的是,该行业预算的99.6%已被分配用于开发支出(图2)。
技术问责报告 - 2024年7月
注意:1。截至07/31/2024,它有106个批准的IT项目。2。106个项目的总预算成本为411,518,253美元。3。项目管道在7个焦点区域中的每个区域中至少包括一个项目。4。最多的活跃IT项目与26个项目保持一致,预算总成本为6390万美元,安全重点领域,有25个项目,预算总成本为1.847亿美元,可持续的重点领域,24个项目,总预算成本为1.169亿美元,预算为11.69亿美元,预算为9.4m的预算成本,为9.40万美元,不断增长的项目。宜居的重点区域有7个项目,总预算成本为390万美元,在财政上有4个项目,预算总成本为2570万美元。

2022/2023 年度预算情况说明书 1. 经济展望 ...
2022/23 财年政府的支出政策以国家转型战略的优先事项和目标为指导。经济转型支柱占据了资源的最大份额,为 2,7248 亿瑞士法郎,占总预算的 58.5%。社会转型将占用 1,2265 亿瑞士法郎(26.3%),而转型治理将分配 7072 亿瑞士法郎,占总预算的 15.2%。
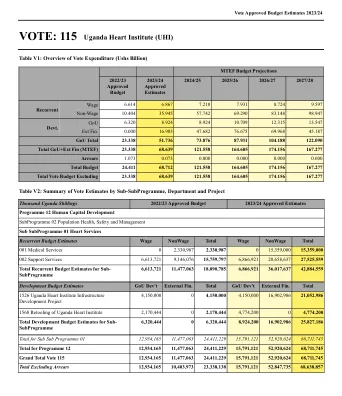
投票:115乌干达心脏研究所(UHI)
总预算输出成本000005 6,613,721 5,539,334 12,153,055 6,866,921 16,582,486 23,449,407


最小化初始实验设计样本集分位数的预算分配策略 Ziwei Lin、Andrea Matta、Shichang Du 这是 Acce
N :总预算规模 K :聚类组数 nk :分配给组 k 的总预算规模,PK k =1 nk = NS ( n 1 , · · · , n K , ξ ) :最终样本集 α :S ( n 1 , · · · , n K , ξ ) 中良好解决方案的比例,α = r/NN s :阶段后的总分配预算规模 sns,k :阶段 s 后组 k 的总分配预算规模 ˆ µ k , ˆ σ 2 k :组 k 中 y ( · ) 的样本均值和样本方差 ˆ b :当前最佳组 ˆ τ :估计阈值
Özgür早期-Ankara
(2021-2023),一种用于移动平台的广义自适应多任务感知系统,首席研究员。(总预算:〜150.000欧元) - BAP(科学研究项目),“ FKB-2022-20194”,自动移动车辆2022-2024中的异常检测,首席研究员(总预算:〜5500欧元) - BAP(BAP) - BAP(科学研究项目),“ Fay-20222222-20118”,derike Yquik yelikexexexe; tabanlıotonom sistemuygulamalarınınınınınınetirmesi2022-2023,研究(总预算:〜110.000欧元) - 自动驾驶感知的联合项目(Inria/Toyota Collaporation),不同的主题(2017-2021),研究者,研究者。- 欧盟项目(欧盟),第3 rd手机机器人,(2013-2017),研究人员。- TübiTak(土耳其科学和技术研究基金会),“ 111E285”,通过比较多机器人的方法学方法的混合映射和场景感知,(2012-2013),博士生。- BAP(科学研究项目),“ 5720”,不同的感知类型和通过Multirobot Systems 2011-2012的通信共享,博士生。- BAP(科学研究项目),“ 09ha210d”,《多机器人的场景识别》,2009- 2010年,博士生。-Tübitak“ 107M240”,基于注意的移动机器人的场景识别,导航和协调,(2007- 2010年),博士生。