XiaoMi-AI文件搜索系统
World File Search System扇区

en29lv320c(2y)32 Megabit(4096K x 8-bit / 2048k x 16位)闪存启动扇区闪存闪存,CMOS 3.0 volt-oflt-inly < / div>
b。在待机模式中,输出处于高阻抗状态,而不是OE#输入。自动睡眠模式该设备具有自动睡眠模式,可最大程度地减少功耗。当地址总线的状态保持稳定为T ACC + 30N时,设备将自动进入此模式。DC特征表中的 ICC 4显示了当前规范。 使用标准访问时间,当地址更改时,设备将输出新数据。 读取模式,将设备自动设置为读取设备加电或硬件重置后的数组数据。 检索数据不需要命令。 该设备还可以在完成嵌入式程序或嵌入式擦除算法后读取数组数据。 设备接受扇区擦除悬挂命令后,该设备将进入扇区擦除悬挂模式。 系统可以使用标准读取时间读取数组数据,除了它在擦除悬浮扇区中的地址读取,设备会输出状态数据。 在扇区擦除悬挂模式下完成编程操作后,系统可以再次读取数组数据,并具有相同的例外。 有关更多其他信息,请参见“部门擦除暂停/简历命令”。 系统必须发出重置命令,以重新启用DQ5较高或在自动选择模式时读取数组数据的设备。 有关其他详细信息,请参见“重置命令”。 OE#引脚处于逻辑高级别时输出禁用模式(V B IHICC 4显示了当前规范。使用标准访问时间,当地址更改时,设备将输出新数据。读取模式,将设备自动设置为读取设备加电或硬件重置后的数组数据。检索数据不需要命令。该设备还可以在完成嵌入式程序或嵌入式擦除算法后读取数组数据。设备接受扇区擦除悬挂命令后,该设备将进入扇区擦除悬挂模式。系统可以使用标准读取时间读取数组数据,除了它在擦除悬浮扇区中的地址读取,设备会输出状态数据。在扇区擦除悬挂模式下完成编程操作后,系统可以再次读取数组数据,并具有相同的例外。有关更多其他信息,请参见“部门擦除暂停/简历命令”。系统必须发出重置命令,以重新启用DQ5较高或在自动选择模式时读取数组数据的设备。有关其他详细信息,请参见“重置命令”。OE#引脚处于逻辑高级别时输出禁用模式(V B IH

论量子轨迹中对称性破缺和耗散冻结的普遍性
最近,几项涉及具有强对称性的开放量子系统的研究发现,主方程的蒙特卡罗解法中的每一条轨迹都会动态地选择一个特定的对称扇区,在长期极限内“冻结”在其中。这种现象被称为“耗散冻结”,在本文中,我们通过介绍该问题的几个简单的数学观点,认为这是开放系统中存在强对称性的普遍结果,只有少数例外。我们使用许多示例系统来说明这些论点,揭示了非对角对称扇区中刘维尔谱特性与冻结发生所需时间之间的明确关系。在这些扇区中出现纯虚特征值的特征模式的极限情况下,冻结不会发生。此类模式表明系统对称扇区之间信息和相干性的保存,并可能导致非平稳性和同步等现象。单个量子轨迹水平上没有冻结现象,这为识别这些无迹模式提供了一种简单、计算有效的方法。

MF1 IC S50-Adafruit
– 稳压器 • 防冲突:可以选择并按顺序操作现场的多张卡 • 身份验证:在任何内存操作之前,身份验证程序可确保只能通过为每个块指定的两个密钥才能访问块 • 控制和算术逻辑单元:值以特殊的冗余格式存储,可以递增和递减 • EEPROM 接口 • 加密单元:Mifare Classic 系列经过现场验证的 CRYPTO1 流密码可确保安全的数据交换 • EEPROM:1 KB 分为 16 个扇区,每个扇区有 4 个块。一个块包含 16 个字节。每个扇区的最后一个块称为“尾部”,其中包含两个密钥和此扇区中每个块的可编程访问条件。

爆炸箔和线材的 SXR/EUV 辐射光谱、空间和
图 2. 铝丝负载(3 根卷在一起的丝,每根直径为 25 μm)在长度为 4 mm 的爆炸下获得的实验结果:a – 负载放电电流信号的波形图、PCD 信号曲线、MCP 扇区的开启时刻(显示为 PCD 信号曲线下方的棍棒);b – 从电流脉冲开始计算,在 I – 90 ns、II – 100 ns、III – 110 ns 时刻开启的 MCP 扇区的空间分辨率光谱记录;c – 光谱强度分布图,从上到下编号并标记为左(L)和右(R),(记录 R 中零级右侧的下降是由于 MCP 扇区之间存在非工作区);d – 相对辐射强度(RRI)在上述三个时刻的最大光谱强度区域中对空间坐标的依赖关系。

Mark 92 改进型 6 火控系统和 APL...
1985 年,Russell Rzemien、Jay F. Roulette 和 Paul R. Bade 设计了最初的 MK 92 MOD 6 CDC。CDC 记录雷达回波的同相和正交分量,以及其他相关雷达信息。雷达制造商制造了定制雷达接口板,从 FCS 中提取所需的雷达信号。CDC 能够与 CAS 搜索、CAS 跟踪或 STIR 进行交互。CDC 一次只能从其中一个雷达收集数据。最初,数据存储在缓冲区中,然后传输到九轨磁带中。几年后,原来的磁带驱动器被更快、更密集的 8 毫米磁带驱动器取代,从而可以记录更多数据。由于数据传输到磁带的速度不能和从雷达接收数据的速度一样快,因此只能记录一部分数据。收集搜索数据时,记录的数据仅限于操作员指定的扇区内,该扇区的范围和方位有限。最初,扇区大小不能比 10° x 15 英里大很多,具体取决于雷达波形。收集轨迹数据时,CDC 会在指定的时间段内连续收集数据,然后将数据下载到磁带并重复该循环。当 CDC 将数据下载到磁带时,不会记录雷达在此期间发送的轨迹数据。多年来,CDC 被用于许多数据收集练习和测试活动。尽管 CAS 搜索收集的扇区大小相对较小,并且收集轨迹数据的时间相对较短,但事实证明这些数据非常有用。困扰 MOD 6 系统的问题之一是,如果没有大型 CAS 搜索收集扇区,就很难进行分析。为了充分描述问题并评估所提出的方法,扇区大小至少为全范围的 25°。更大的收集扇区需要设计和建造一个新的 MOD 6 CDC。Russell Rzemien、Ronald J. Clevering、Brian A. Williamson 和 Daryl I. Tewell 于 1994 年设计并建造了新的 MOD 6 CDC。雷达和 CDC 之间的接口保持不变。新的 CDC 利用了

Mark 92 改进型 6 火控系统和 APL 的相干雷达数据程序
1985 年,Russell Rzemien、Jay F. Roulette 和 Paul R. Bade 设计了最初的 MK 92 MOD 6 CDC。CDC 记录雷达回波的同相和正交分量,以及其他相关雷达信息。雷达制造商构建了定制的雷达接口板,从 FCS 中提取所需的雷达信号。CDC 能够与 CAS 搜索、CAS 跟踪或 STIR 接口。CDC 一次只能从其中一个雷达收集数据。最初,数据存储在缓冲区中,然后传输到九轨磁带上。几年后,原来的磁带驱动器被更快、更密集的 8 毫米磁带驱动器取代,从而可以记录更多的数据。由于数据传输到磁带的速度不能像从雷达接收数据那样快,因此只能记录一部分数据。在收集搜索数据时,仅记录操作员指定的范围和方位有限的扇区内的数据。最初,扇区大小不能比 10 ° x 15 mi 大太多,具体取决于雷达波形。在收集轨迹数据时,CDC 会在指定的时间内连续收集数据,然后将数据下载到磁带并重复该循环。当 CDC 将数据下载到磁带时,不会记录雷达在此期间发送的轨迹数据。多年来,CDC 用于许多数据收集练习和测试活动。虽然用于 CAS 搜索收集的扇区大小相对较小,并且可收集轨迹数据的时间相对较短,但事实证明这些数据非常有用。困扰 MOD 6 系统的问题之一是,如果没有大型 CAS 搜索收集扇区,则很难进行分析。为了充分描述问题并评估所提出的方法,需要一个至少为 25 ° x 全范围的扇区大小。更大的收集扇区需要设计和构建新的 MOD 6 CDC。 Russell Rzemien、Ronald J. Clevering、Brian A. Williamson 和 Daryl I. Tewell 于 1994 年设计并建造了新的 MOD 6 CDC。雷达和 CDC 之间的接口保持不变。新的 CDC 利用
Mark 92 改进型 6 火控系统和 APL 的相干雷达数据程序
1985 年,Russell Rzemien、Jay F. Roulette 和 Paul R. Bade 设计了最初的 MK 92 MOD 6 CDC。CDC 记录雷达回波的同相和正交分量,以及其他相关雷达信息。雷达制造商构建了定制的雷达接口板,从 FCS 中提取所需的雷达信号。CDC 能够与 CAS 搜索、CAS 跟踪或 STIR 接口。CDC 一次只能从其中一个雷达收集数据。最初,数据存储在缓冲区中,然后传输到九轨磁带上。几年后,原来的磁带驱动器被更快、更密集的 8 毫米磁带驱动器取代,从而可以记录更多的数据。由于数据传输到磁带的速度不能像从雷达接收数据那样快,因此只能记录一部分数据。在收集搜索数据时,仅记录操作员指定的范围和方位有限的扇区内的数据。最初,扇区大小不能比 10 ° x 15 mi 大太多,具体取决于雷达波形。在收集轨迹数据时,CDC 会在指定的时间内连续收集数据,然后将数据下载到磁带并重复该循环。当 CDC 将数据下载到磁带时,不会记录雷达在此期间发送的轨迹数据。多年来,CDC 用于许多数据收集练习和测试活动。虽然用于 CAS 搜索收集的扇区大小相对较小,并且可收集轨迹数据的时间相对较短,但事实证明这些数据非常有用。困扰 MOD 6 系统的问题之一是,如果没有大型 CAS 搜索收集扇区,则很难进行分析。为了充分描述问题并评估所提出的方法,需要一个至少为 25 ° x 全范围的扇区大小。更大的收集扇区需要设计和构建新的 MOD 6 CDC。 Russell Rzemien、Ronald J. Clevering、Brian A. Williamson 和 Daryl I. Tewell 于 1994 年设计并建造了新的 MOD 6 CDC。雷达和 CDC 之间的接口保持不变。新的 CDC 利用
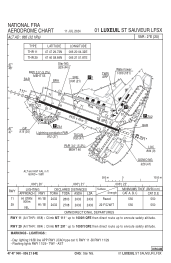
01 luxeuil st sauveur lfsx
多方向起飞 1500 英尺 QFE MAX,但 QFU 的 ARR 扇区(ER 和 IP 之间)除外,使用 1000 英尺 QFE MAX。滑行时报告 HGT 和出口点。空中时,DEP 在 2500 英尺 QFE 或以下,预计在 CH TWR CH 14 上接触;在 2500 英尺 QFE 以上,预计在 CH 15 上接触 特殊说明:当 AD 为绿色状态“OAT Victor Special”时:在 1000 英尺 QFE 或云层以下可能出现 OAT Victor Special 下的 DEP。滑行时报告 HGT 和出口点。通过 ARR 扇区的 DEP 在 TKOF 之前提交给 APP。

Augustin Vanrietvelde、Giulio Chiribella。使用扇区保留通道对量子过程进行通用控制。量子信息与计算,
没有量子电路可以将完全未知的单元门变成其相干控制版本。然而,实验中已经实现了对未知门的相干控制,利用了不同类型的初始资源。在这里,我们将这些实验实现的任务形式化,将其扩展到任意噪声信道的控制,以及涉及更高维控制系统的更一般类型的控制。对于相干控制的标准概念,我们确定了用于控制 d 维系统上任意量子信道的信息论资源:具体而言,该资源是一个扩展的量子信道,充当 (d + 1) 维系统的 d 维扇区上的原始信道。使用此资源,可以用通用电路架构构建任意受控通道。然后,我们将标准的控制概念扩展为更一般的概念,包括对可能具有不同输入和输出系统的多个通道的控制。最后,我们开发了一个理论框架,称为路由通道上的超级映射,它提供了将相干控制作为在扩展通道上执行的操作的紧凑表示,并强调了该操作对不同部门的作用方式。