XiaoMi-AI文件搜索系统
World File Search System手动
手动
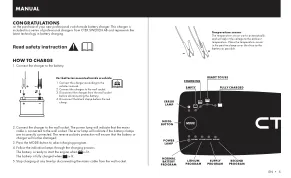
带有“电压保护”的电池,某些锂电池具有车载UVP(电压保护),可断开电池连接,以避免电池变得太深。这禁止充电器检测到电池连接。要绕过这一点,电池充电器需要打开UVP。有两种选项可“唤醒”电池 - 自动和手动。在自动“唤醒”期间,LED将闪烁,直到启动充电程序并用稳定的光线点亮。自动“唤醒”最多可活动5分钟。如果充电器在10分钟后处于待机模式(电源LED正在闪烁),则自动唤醒未成功。尝试手动醒来。要使用手册“唤醒”,请按模式按钮约10秒钟以绕过UVP。在“唤醒”期间,LED将闪烁,直到启动电荷程序并以稳定的灯光点亮。如果手动唤醒不成功,电源LED将在最新10分钟后开始闪烁。断开电池的任何平行负载,然后重试。如果在此之后未启动充电,则可能需要更换电池。
手动
4.21.6.1简单的跳线。。。。。。。。。。。。。。。。。。。。。。。。。。。。。169 4.21.6.2双向(三针)跳线。。。。。。。。。。。。。。。。。。。。169 4.21.7焊接跳线。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。170 4.22逻辑门。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。171 4.22.1美国逻辑大门。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。171 4.22.2 IEEE逻辑门。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。172 4.22.3欧洲逻辑门。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。173 4.22.4路径风格的逻辑端口。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。174 4.22.5美国端口使用情况。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。176 4.22.5.1美国逻辑端口自定义。。。。。。。。。。。。。。。。。。176 4.22.5.2美国逻辑端口锚。。。。。。。。。。。。。。。。。。。。。177 4.22.6 IEEE逻辑门用法。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。179 4.22.6.1堆叠和对齐IEEE标准门。。。。。。。。。。。。。。181 4.22.6.2 IEEE标准端口自定义。。。。。。。。。。。。。。。。。181 4.22.6.3 IEEE标准端口锚。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 183 4.22.6.4传输门符号。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 183 4.22.7欧洲逻辑端口使用情况。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。181 4.22.6.3 IEEE标准端口锚。。。。。。。。。。。。。。。。。。。。。183 4.22.6.4传输门符号。。。。。。。。。。。。。。。。。。。。。。。183 4.22.7欧洲逻辑端口使用情况。。。。。。。。。。。。。。。。。。。。。。。。。。。。184

手动 LUC+400
目录 1. 本操作手册的一般信息 2 1.1 信号词 2 1.2 安全符号 3 1.3 安全信息的结构 3 1.4 信息符号 3 2. 安全 4 2.1 EC/EU 指令 4 2.2 危险 4 2.3 人员 4 2.4 合理可预见的误用 4 2.5 预期用途 5 2.6 担保和责任 5 2.7 一般安全说明 6 3. 功能说明 7 3.1 一般信息 7 3.2 铭牌 8 3.3 标记 8 3.4 订购代码 9 3.5 尺寸 9 3.6 交付范围 9 3.7 技术数据 10 4. 运输和储存 11 4.1 包装 11 4.2 运输 11 4.3 储存 11 5. 型号 12 5.1 LUC + 400, 1 个泵体,1 个出口(订货代码:LUC+400-xx11-xx) 12 5.2 LUC + 400,1 个泵体,2 个出口(订货代码:LUC+400-xx21-xx) 12 5.3 LUC + 400,2 个泵体,2 个出口(订货代码:LUC+400-xx51-xx) 13 5.4 LUC + 400,2 个泵体,3 个出口(订货代码:LUC+400-xx31-xx) 13 5.5 LUC + 400,2 个泵体,2 个出口(订货代码:LUC+400-xx41-xx) 14 6. 组装 15 6.1 准备工作 15 6.2 组装 15 6.3 调试 17 7. 操作和控制 18 7.1 一般信息18 8. 输入和输出信号 – 外部控制系统 (PLC) 19 8.1 引脚分配 – 外部控制系统 (PLC) 19 8.2 输入信号 – 外部控制系统 (PLC) 20 8.2.1 2 秒控制信号 20 8.2.2 5 秒控制信号 22 8.2.3 8 秒控制信号 23 8.2.4 12 秒控制信号 24 8.2.5 14 秒控制信号 26 8.3 输出信号 – 外部控制系统 (PLC) 27

手动梳子。
版权所有©12月12日INSYS Microelectronics GmbH禁止该手册的任何重复。本文档和设备的所有权利都带有Insys Microelectronics GmbH Regensburg。本手册包含功能的描述。文本的汇编是在谨慎和努力的情况下进行的。尽管做出了所有努力,但实际功能可能会偏离。因此,不能保证内容的准确性。我们既不能承担法律责任,也不能对信息不正确的任何责任,也不能承担任何后果。总是欢迎改进和评论的建议。商标和徽标使用以下商标或徽标的使用并不表示可以免费使用。insys lokks™是Insys Microelectronics GmbH的注册品牌。Windows™是Microsoft Corporation的注册商标。发布者:
手动UROVO DT50
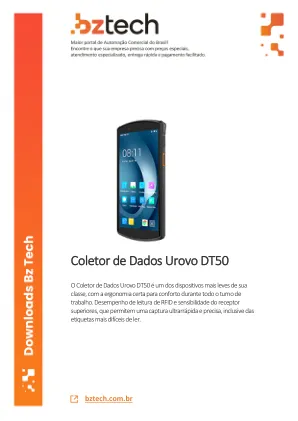
Ureovo DT50数据收集器是其类别最轻的设备之一,在整个工作转移过程中,符合舒适度的正确人体工程学。RFID阅读性能和较高的接收器灵敏度,允许超级和准确的捕获,包括最难读取标签。

手动UROVO DT50
Ureovo DT50数据收集器是其类别最轻的设备之一,在整个工作转移过程中,符合舒适度的正确人体工程学。RFID阅读性能和较高的接收器灵敏度,允许超级和准确的捕获,包括最难读取标签。
手动UROVO DT50
Ureovo DT50数据收集器是其类别最轻的设备之一,在整个工作转移过程中,符合舒适度的正确人体工程学。RFID阅读性能和较高的接收器灵敏度,允许超级和准确的捕获,包括最难读取标签。

与手动评估相比
目的:在这项概念验证研究中,我们提出了一种新的方法,用于将泡沫的数字量化(优先表达的黑色素瘤抗原)作为诊断辅助,以区分良性和恶性黑素细胞病变。所提出的方法利用了Prame和Sox10的免疫组织化学虚拟双核染色来精确识别感兴趣的黑素细胞细胞,该细胞与数字图像分析相结合以量化词点。方法:我们的研究包括10种化合物Nevi,3个Halo Nevi和10个黑色素瘤。组织载玻片用泡沫染色,扫描,盖玻璃玻璃玻璃玻璃,用Sox10染色,再次扫描,最后进行数字分析。使用标准的定位系统,将数字定量的核索引与皮肤科医生的手动定性评估进行了比较。结果:数字量化的核索引的灵敏度为70%,特异性为100%,用于将黑色素瘤与良性病变分离。手动定性核得分的灵敏度为60%,特异性为100%。使用ROC-Analyses比较两种方法,我们的数字定量方法(AUC:0.931,95%CI:0.834; 1.00,SD:0.050)与手动定性方法(AUC:0.877,95%CI:0.725:0.725; 1.725; 1.00,SD:0.725; 1.00; 1.00; 1.00; 0.078:0.025;结论:我们发现,我们的新型数字定量方法至少在将病变分类为良性或恶性的情况下与当前的手动定性评估一样精确。我们的方法具有成为操作员独立,客观和可复制的优势。此外,我们的方法可以轻松地在已经数字化的病理部门中实施。鉴于队列的大小很小,要进行更多的研究来验证我们的发现。
CMS手动系统
A.背景:MS-DRG 018“嵌合抗原受体(CAR)T细胞免疫疗法”在财政年度(FY)2021创建了包括描述CAR-T细胞疗法的程序的病例。在2022财年,将标题修改为“嵌合抗原受体(CAR)T细胞和其他免疫疗法”。DRG重量调整因子被应用于MS-DRG 018进行临床试验的主张,并扩大了使用免疫疗法病例,其中CAR-T细胞和其他免疫疗法产品未以通常的方式购买。但是,当汽车T细胞或其他免疫疗法产品以通常的方式购买,但该案例涉及对不同产品的临床试验,则不适用于计算该案的付款。CR 11879实施了一种机制,可以使提供者通知其MAC此类病例(国际疾病分类,第十修订,临床修改(ICD-10-CM)(索赔中的诊断代码Z00.6)。提供者可以在电子索赔837i上输入计费注释NTE02“ DIFF POD CLIN试验”,或在直接数据输入(DDE)或纸质索赔上进行备注“ DIFF POD CLIN试验”,并指示MACS仅将付款人条件代码ZC添加,以便在计算付款中不应用付款付款。