XiaoMi-AI文件搜索系统
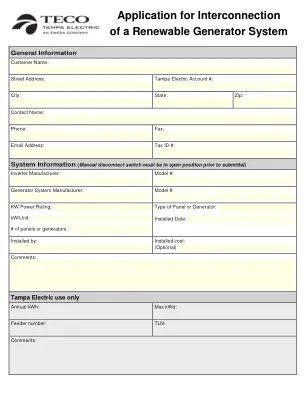
World File Search System手动断开
人为因素分析和分类系统 (HFACS)
仅在 64 节以下减速油门不会产生任何效果。当自动系统切换到“油门保持”模式时,自动油门才会以这种方式在 64 节以上断开。低于此速度时必须手动断开自动油门。

机器人总线低级控制系统转换为开放...
摘要。本文提出了一种从一个机器人总线(即自主班车到另一个具有不同规格的电子和机械视角规格。在这项工作中,我们执行了一系列实验,以测试自动班车的可靠性和安全性,在将与转向和刹车相关的关键控制系统转移到航天飞机中。为了满足在爱沙尼亚道路上注册自主班车作为合法车辆的要求,我们对班车的低级控制系统进行了几项重要测试。例如,我们手动断开了不同的子系统,以模拟突然无法检查航天飞机是否使用相应的协议起作用(即,当转向控制区域网络失败时,班车应启动制动并切断高速电量功率)。本文证明了在自主航天飞机的不同模型之间转移低级控制系统的可能性,而不会冒着遇到安全/可靠性相关问题的风险。我们的开源解决方案将来有助于对自动班车的实际推广和商业化。

基于 DO-178C/DO-331 的精益、高度自动化的基于模型的软件开发流程
摘要 — 城市空中交通和无人机系统全球市场的兴起吸引了世界各地的许多初创企业。这些组织在民航用于开发软件和电子硬件的传统流程方面几乎没有接受过培训或经验。他们还受到资源限制,无法分配给专业团队遵循这些标准化流程。为了填补这一空白,本文提出了一种自定义工作流程,该工作流程基于从安全关键软件基础标准 DO-178C/DO-331 派生的一组目标。从标准中选择目标是基于特定目标的重要性、自动化程度和可重用性。该自定义工作流程旨在建立精益且高度自动化的开发生命周期,从而为研究和原型飞机提供更高质量、可维护性更好的软件。它还可以作为某些应用软件(如无人机系统、城市空中交通和通用航空)的合规手段。通过生成必要的开发和验证工件集,自定义工作流程还为未来符合 DO-178C/DO-331 的潜在认证提供了可扩展的基础。自定义工作流程在自动驾驶仪手动断开系统案例研究中得到演示。索引术语 —DO-178C、DO-331、软件保证、安全关键系统、精益软件开发、基于模型的开发、需求管理、敏捷开发
基于 DO-178C/DO-331 的精益、高度自动化的基于模型的软件开发流程
摘要 — 城市空中交通和无人机系统全球市场的兴起吸引了世界各地的许多初创企业。这些组织在民航用于开发软件和电子硬件的传统流程方面几乎没有接受过培训或经验。他们还受到资源限制,无法分配给专业团队遵循这些标准化流程。为了填补这一空白,本文提出了一种自定义工作流程,该工作流程基于从安全关键软件基础标准 DO-178C/DO-331 派生的一组目标。从标准中选择目标是基于特定目标的重要性、自动化程度和可重用性。该自定义工作流程旨在建立精益且高度自动化的开发生命周期,从而为研究和原型飞机提供更高质量、可维护性更好的软件。它还可以作为某些应用软件(如无人机系统、城市空中交通和通用航空)的合规手段。通过生成必要的开发和验证工件集,自定义工作流程还为未来符合 DO-178C/DO-331 的潜在认证提供了可扩展的基础。自定义工作流程在自动驾驶仪手动断开系统案例研究中得到演示。索引术语 —DO-178C、DO-331、软件保证、安全关键系统、精益软件开发、基于模型的开发、需求管理、敏捷开发