XiaoMi-AI文件搜索系统
World File Search System拥挤的

JRDB-Panotrack:一个开放世界的全景进行分割和跟踪拥挤的人类环境中的机器人数据集
自主机器人系统近年来引起了越来越多的关注,在这种环境中,环境是机器人导航,人类机器人互动和决策的关键步骤。现实世界机器人系统通常会从多个传感器中收集视觉数据,并经过重新识别以识别许多对象及其在复杂的人拥挤的设置中。传统的基准标记,依赖单个传感器和有限的对象类和场景,无法提供机器人对策划导航,互动和决策的需求的综合环境理解。作为JRDB数据集的扩展,我们揭开了一种新颖的开放世界式分割和跟踪基准,介绍了一种新型的开放世界式分割和跟踪基准。JRDB-Panotrack包括(1)各种数据室内和室外拥挤的场景,以及

无障碍设施和拥挤的人行道:微型交通对公共空间的影响。载于 DIS'21 会议论文集:ACM
在过去十年中,“微出行”一词已灵活地涵盖各种小型联网车辆,用于短距离运送人员和货物。电动滑板车和自动送货机器人等服务被誉为解决汽车拥堵和公共交通不足的双重问题的答案,它们迅速发展成为城市计划的焦点,促进了美国各城市的经济发展、可持续发展和交通。例如,匹兹堡市长比尔·佩杜托(Bill Peduto)简要总结了政府参与共享微出行等创新计划的吸引力。“你可以设置繁文缛节,也可以铺开红地毯。如果你想成为 21 世纪的技术实验室,你就铺上红地毯” [53]。佩杜托市长和许多其他政府代表都认为监管可能会扼杀商业进步,他们热情地将自己的城市作为试验台,以获得对支持发展所谓的新型智慧城市的认可 [29,56]。

免疫记录317成人疫苗每日使用日志卫生部诊所提供者的免疫更新
在避难所和疏散中心等拥挤的空间中,可以增加您从呼吸道病毒(例如Covid-19,Flu和RSV以及其他传染病)等呼吸道病毒中生病的机会。采取步骤保护自己:
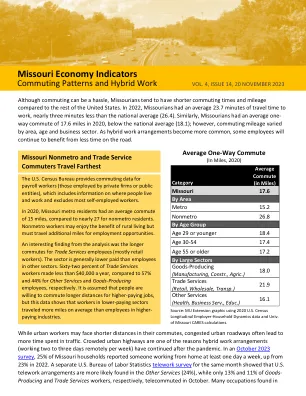
密苏里经济指标 - 通勤...
尽管城市工人的通勤可能会遇到较短的距离,但拥挤的城市道路通常会导致更多的时间在交通中。拥挤的城市高速公路是混合工作安排(每周两到三天的工作)的原因之一。在2023年10月的一项调查中,密苏里州有25%的家庭报告说,每周至少有一天在家工作,高于2022年的23%。同期的美国劳工统计局单独的远程远程运营调查表明,美国远程办公室的安排更有可能在其他服务(24%)中发现,而分别在10月远程销售的商品生产和贸易服务工作人员中只有13%和11%。在

急诊室拥挤级别及其在埃塞俄比亚亚的斯亚贝巴选定的公立医院的决定因素
Turkoz B等。 急诊科过度拥挤的原因:教育和研究医院的经验和建议。 Turk J Emerm Med [Internet]。 2016年2月26日[引用2022年9月30日]; 14(2):59-63。 可从:https://www.ncbi.nlm.nih.gov/pmc/articles/pmc4909875/Turkoz B等。急诊科过度拥挤的原因:教育和研究医院的经验和建议。Turk J Emerm Med [Internet]。 2016年2月26日[引用2022年9月30日]; 14(2):59-63。 可从:https://www.ncbi.nlm.nih.gov/pmc/articles/pmc4909875/Turk J Emerm Med [Internet]。2016年2月26日[引用2022年9月30日]; 14(2):59-63。可从:https://www.ncbi.nlm.nih.gov/pmc/articles/pmc4909875/

拥挤终端空域中的 UAS 集成
摘要:在拥挤的终端环境(例如繁忙的商业机场)中操作无人机系统 (UAS) 的需求日益增加。这种需求给飞行员带来了挑战。为了确定这些挑战,我们对飞行员进行了关键决策方法 (CDM) 访谈。CDM 是一种认知任务分析方法,旨在揭示隐性认知挑战。采访了来自美国的八名飞行员,其中包括四名 UAS 飞行员和四名商业飞行员。使用主题分析法对访谈进行了分析,结果确定了四类认知挑战:(i)注意异常,(ii)诊断自动化行为,(iii)了解何时以及如何干预,以及(iv)与空中交通管制协调。在本文中,我们描述了每个挑战,重点介绍了我们采访中的真实案例,并针对在拥挤的终端空域中整合 UAS 的影响提出了一些建议。

使用NFC能源收集技术构建无电池智能锁
3。如何减少在具有挑战性的网络中运行的功耗?IoT设备距离接入点或拥挤的网络距离运行,经历了由于无线频谱的效率低下而引起的电力消耗挑战。由于消费者可以将其智能家居设备放置在家里的任何地方,因此选择具有经验丰富的访问点互操作性和稳健的RF性能的Wi-Fi解决方案对于避免通过重新递送浪费功能至关重要。IP摄像头和门锁通常放在远离其访问点的房屋外部。浪费重试的另一个原因是在越来越拥挤的2.4GHz乐队中运行。提供使用5GHz频段选项的双频段设备通常会更好地处理网络拥塞,并在主动模式下花费更少的时间等待其传输机会。

扭曲工程T4 DNA连接酶
拥挤的药物可在提高速度和效率的可选努力中使用了粘性拥挤剂,例如聚乙烯甘油(PEG),以增加底物的局部浓度并推动反应前进。但是,这种拥挤的代理可能会增加变异性或对于自动分配系统而言很难使用。此外,在克隆反应中使用拥挤剂需要在转换之前进行纯化步骤,这增加了动手的时间和处理。我们研究了在0%,2.5%和5%PEG 8000的情况下,各个连接酶对CFDNA底物的疗效。我们引用了电文件图的痕迹以识别3个连续的峰:底物,底物 + 1个适配器和底物 + 2个双侧适配器。如图5所示,扭曲工程的T4 DNA连接酶可以将大部分底物转换为所需的双连接峰独立于拥挤剂输入。

技术、媒体和电信预测
在我们连接之前太拥挤了?宽带卫星需要在拥挤的天空中航行。低地球轨道卫星可以将高速互联网带到世界的每个角落——前提是它们可以互不干扰。幸运的是,邻近行业正在准备提供帮助。

管理团队冲突 - Navfac
“当我们在拥挤的高速公路上体验‘路怒症’时,这并不是因为我们是反社会的怪物。这是因为暂时坐在汽车方向盘后面,周围都是粗鲁无耐的司机,这导致我们原本平静的举止发生了变化。我们不知不觉地将自己置于一个充满不耐烦、竞争和敌意的环境中——这改变了我们。”