XiaoMi-AI文件搜索系统
World File Search System拾取

TM 9-1300-251-34&P - 子弹拾取器
起吊塞-扭矩扳手适配器...................... ... . . . . . . . . 金属包装箱上的标记. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................. ... 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 Bourrelet 环规。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。外壳环规。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 ....................................................................................................................................................................................................................................... 35mm TPT 弹药筒的典型标记 M968....................................................................................................................................................................... 40mm 榴弹筒的典型标记 M381、M382、M386、M406、
MIL-STD-444 - 子弹拾取器
(源于法语中的 munition。la muni tion 为 l'ammunition。)1.一个通用术语,包括向敌人投掷的所有形式的导弹,例如子弹、射弹、火箭、手榴弹、鱼雷、炸弹和制导导弹,以及它们所需的推进剂、底火、引信、雷管和常规炸药、核炸药、化学炸药或其他材料的炸药。2.从最广泛的意义上讲,该术语不仅限于那些要投掷或用于对付敌人的材料,而且除了意义 1 中给出的物品和材料外,还包括所有爆炸物、爆炸装置、烟火和烟火装置。目的不受限制,并且:除了直接用于对付敌人之外,还包括照明、信号、敬礼、采矿、挖掘、切割、加速、减速分离、弹射人员或材料、操作或停止机制、爆破、驱散、练习、训练、守卫、狩猎和纯运动等用途。3.在最严格的意义上,该术语包括完整的一轮及其所有组成部分。迫使诸如手枪、步枪或加农炮之类的武器投掷射弹以对敌人造成伤害所需的材料。通常,除非表明或上下文暗示了更严格的含义,否则该术语的使用或理解为其最广泛的含义(含义 2)。
MIL-STD-444 - 子弹拾取器
(源自 munition,将 Fr. la muni tion 改为 l'ammunition。)1. 一个通用术语,包括所有向敌人投掷的导弹,例如子弹、射弹、火箭、手榴弹、鱼雷、炸弹和制导导弹,以及它们必要的推进剂、底火、引信、雷管和常规爆炸物、核爆炸物、化学或其他材料的装药。2. 从最广泛的意义上讲,该术语不仅限于那些要投掷或用于对付敌人的材料,除了含义 1 中给出的物品和材料外,还包括所有爆炸物、爆炸装置、烟火和烟火装置。其目的不受限制,除直接用于对付敌人外,还包括照明、发信号、敬礼、布雷、挖掘、切割、加速、减速、分离、弹射人员或材料、操作或停止机制、爆破、驱逐、练习、训练、守卫、狩猎和纯运动。3. 在最严格的意义上,该术语包括一整发子弹及其所有组成部分,即迫使手枪、步枪或加农炮等武器投掷射弹对敌人造成伤害所需的材料。通常,该术语按其最广泛的含义使用或理解(含义 2),除非另有说明或上下文暗示有更严格的含义。

GMC Sierra EV 4门拾取卡车
在完成驱动周期并将车辆移至P(Park)时关闭电源,当检测到驾驶员出口时,车辆将关闭。也可以通过在信息娱乐显示屏上按“车辆关闭”符号来关闭车辆。如果车辆尚未从P(公园)移出,则不会根据驾驶员出口检测而关闭,并且需要为

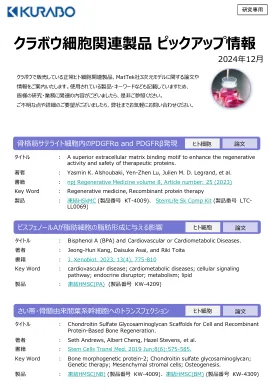
薄型和矩形芯片粘合拾取机制...
芯片贴装是集成电路 (IC) 封装工艺中最关键的工艺之一。过去几年,芯片厚度越薄,漏源导通电阻 RDS(on) 越小,顶部金属和焊盘之间的硅电阻越低,散热性能越好,堆叠封装厚度越薄,重量越轻,这些要求就越高。这种三维技术代表了封装创新的下一波浪潮,并将在未来几年内实现大幅增长 (Ibrahim 等人,2007 年)。这些趋势对现有的电子封装技术(主要是芯片拾取工艺)提出了相当大的挑战。必须特别注意处理更薄芯片的工艺,以确保半导体产品的可靠性和质量 (Huiqiang 等人,2015 年;Carine 等人,2014 年)。
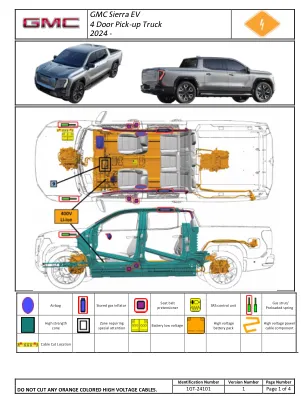
GMC Sierra EV 4门拾取卡车2024-
车辆配备了具有内部故障检测的电池管理系统。如果“检测到电池危险”通知,请不要禁用12V电池。此切口将禁用高压。安全气囊可以通过卸下12V电池负电缆来禁用。如果“检测到电池危险”通知,请勿禁用12V电池。主要方法:1。关闭车辆的电源:•当驱动周期完成并且车辆移至P(公园)时,在检测到驾驶员出口时将关闭车辆。

冷冻粒子拾取机学习竞赛的开源工具
图4:超级金属和金属3D的疯狂分布跨各种概率截止。内核密度估计用于说明分布,突出显示中位数(白色圆圈),四分位数(黑匣子)和数据扩展(晶须量最高为1.5倍。

机器人臂的视觉伺服算法,用于拾取和放置应用
机器人臂是由连接接头连接的链路的移动链组成的设备。电动机经常用于移动每个机器人臂接头。可以在空间中自由移动的最终效应器通常连接到固定的机器人平台的一端。机器人武器可以以速度和精度进行重复操作,远远超过了人类操作员。如今,机器人臂系统在全球范围内广泛使用,以提高行业制造过程的质量和效率。 机器人臂系统的典型应用是组装,绘画,焊接,拾取和放置操作等。 此外,许多行业都采用机器人武器来从事各种工作,例如选择和推杆,绘画和材料处理。 但是,完成这些工作的最具挑战性的问题之一是确定机器人部门最终效力器的目标位置。 有两种分析机器人臂运动的方法:前进和逆运动分析。 基于Visual Servo算法,本研究使用反向运动学来执行挑选和放置操作。 首先,实现了一种对象识别算法来识别要掌握的对象。 然后,避免发生任何障碍的算法。 研究的发现表明,在所有三种算法中都获得了良好的系统性能:首先,对象识别算法,第二,障碍避免算法,最后是基于Visual Servo的挑选和位置操作。 因此,可以得出结论,机器人臂的视觉伺服算法适用于采摘应用。如今,机器人臂系统在全球范围内广泛使用,以提高行业制造过程的质量和效率。机器人臂系统的典型应用是组装,绘画,焊接,拾取和放置操作等。此外,许多行业都采用机器人武器来从事各种工作,例如选择和推杆,绘画和材料处理。但是,完成这些工作的最具挑战性的问题之一是确定机器人部门最终效力器的目标位置。有两种分析机器人臂运动的方法:前进和逆运动分析。基于Visual Servo算法,本研究使用反向运动学来执行挑选和放置操作。首先,实现了一种对象识别算法来识别要掌握的对象。然后,避免发生任何障碍的算法。研究的发现表明,在所有三种算法中都获得了良好的系统性能:首先,对象识别算法,第二,障碍避免算法,最后是基于Visual Servo的挑选和位置操作。因此,可以得出结论,机器人臂的视觉伺服算法适用于采摘应用。

评估技术集成对供应链中订单拾取效率的影响
供应链管理的快速发展是由旨在改善秩序履行过程的技术进步所驱动的。订购订单,这是仓库运营的关键组成部分,传统上依靠体力劳动,导致效率低下,错误和高运营成本。随着自动化,机器人技术和AI驱动的仓库管理系统的出现,供应链已经见证了速度,准确性和成本效益的实质性提高。对电子商务和全球贸易的需求不断增长,加剧了对更有效和无错误的采摘过程的需求。公司越来越多地投资于利用物联网(IoT)传感器,实时跟踪和AI驱动分析的智能仓储解决方案,以优化仓库运营。自动化,包括使用机器人采摘器和自动导向车辆(AGV),在提高订单履行速度并最大程度地减少库存差异的同时,减少了对手动劳动的依赖。此外,数字化转型正在通过整合基于云的仓库管理系统(WMS)来重塑传统供应链模型,从而促进实时可见性和数据驱动的决策。这些系统使企业能够简化物流运营,增强不同供应链利益相关者之间的协调,并对消费者需求的波动更有效地做出响应。尽管有明显的优势,但组织在实施这些技术方面面临一些挑战。高昂的实施成本,对自动化的抵抗力,集成复杂性以及网络安全威胁构成了无缝采用的重大障碍。本研究旨在探索企业如何有效地将技术整合到订购过程中,同时解决这些挑战以最大程度地提高效率和成本节省。通过分析现实世界中的案例研究和行业趋势,该研究试图提供有关技术驱动供应链未来的战略见解。