XiaoMi-AI文件搜索系统
World File Search System指针

仪表 - Passion-Harley
A.组合式模拟速度表/转速表 – 5 英寸 保持车把上方的清晰视野。这款独特的组合式速度表/转速表让您无需添加安装在车把上的转速表即可监控发动机转速。该装置安装在原装仪表板开口中,是直接插入式安装。仪表具有顺时针扫描的速度表和转速表指针,以提供“仪表中的仪表”外观。背光仪表包括一个大型 LCD(液晶显示屏)信息屏幕,可显示里程表/短距离里程表数据、剩余里程读数、易于阅读的分段式燃油显示、档位指示器和时钟。骑手一眼便可看到这些有价值的信息。仪表具有按钮可调节背光,有 600 多种色调可供选择,允许骑手调整指针、LCD 和背光颜色以匹配任何涂装方案或观看偏好。套件包括一条数据传输线,可在安装时轻松上传初始里程。

MCCC 学生供应清单
物品 数量 永久性覆盖笔(红色、黑色、蓝色、绿色、棕色、紫色) 1 套 超细覆盖笔 橡皮擦 2 笔记本 1 3 英寸活页夹 1 图形模板 1 CD-R(可选) 1 包透明胶带(标准和双面透明)各 1 荧光笔 2 抹布(可选) 1 喷雾瓶(可选) 1 地图板(可选) 1 文件保护器 1 盒子 指针(可选) 1 剪刀 1 量角器 1

空军目录
战斗载荷-4个悬挂点上1000公斤:64х S-5非制导导弹UB-16-57UMVP块;4х 100或250公斤炸弹(OFAB-250) 瞄准具配置: 望远式基本瞄准具OPB-1R-用于在水平飞行中对轰炸进行横向和纵向干扰; 准直瞄准具PKV-用于在射击和发射导弹时将直升机指向目标。 主要(基本)设备 基本设备包括: 速度指示器US-450 K; 气压高度表VD-10K; 升降速度计VAR-3MK; 飞行指挥仪表板-72M; 时钟AChS-1M; 指针高度表UV-1P; 人工地平仪AGB-3K; 航向方向指示器EUP-53; 探路者UGP-4UK; 低速指针DIV-1无线电罗盘ARK-U2; 人工地平仪AGB-3K;无线电台 R-860 118,25-136,5 MHz 无线电台 R-842M 2-8 MHz,无线电台“ Karat-M24”2-10,1 MHz,无线电罗盘 ARK-9,无线电高度表 RV-3,语音数据设备 RI-65; 自动无线电罗盘 ARK-U2 带有接收器 R-852,以便将直升机带到紧急 UKV 无线电信标; 对讲机 SPU- 7,短波电台“ Evkalіpt-M24”;

MB90F562BPMC - 富士通有限公司
(续)• 指令集• 位、字节、字和长字数据类型• 23 种不同的寻址模式• 使用 32 位累加器提高计算精度• 增强的有符号乘法和除法指令以及 RETI 指令• 为高级语言(C)和多任务设计的指令集• 使用系统堆栈指针• 对称指令集和桶式移位指令• 程序补丁功能(2 个地址指针)。 • 4 字节指令队列 • 中断功能 • 优先级可编程 • 32 个中断 • 数据传输功能 • 扩展智能 I/O 服务功能:最多 16 个通道 • 低功耗模式 • 睡眠模式(CPU 工作时钟停止。) • 时基定时器模式(仅振荡时钟和时基定时器继续工作。) • 停止模式(振荡时钟停止。) • CPU 间歇工作模式(CPU 以指定间隔间歇工作。) • 封装 • LQFP-64P(FTP-64P-M23:0.65 mm 引脚间距) • QFP-64P(FTP-64P-M06:1.00 mm 引脚间距) • SH-DIP(DIP-64P-M01:1.778 mm 引脚间距) • 工艺:CMOS 技术

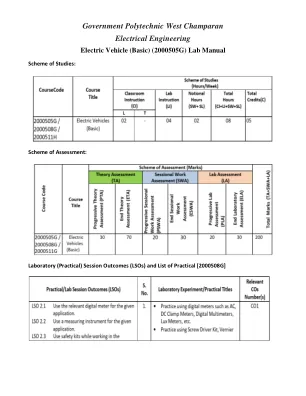
电动汽车(基本)(2000505g)实验室手册
理论: - 电压表是一种用于测量电路中两个点之间电势差的仪器。它是并行连接的。它通常具有高电阻,因此从电路中需要可忽略不计的电流。模拟电压按摩器按照测量的电压成比例地将指针移动,并且可以通过电流计和串联电阻器构建。使用放大器的米可以测量微伏或更少的小电压。数字电压表可以通过使用模拟对数字转换器来显示电压的数值显示。
联邦医疗自由组织诉拜登
1 第 2302(a)(2)(A)(iii) 节(“罗马书 iii”)交叉引用了“本标题第 75 章下的诉讼”。第 75 章未使用短语“人事行动”,而是使用短语“诉讼”。5 USC §§ 7502、7512(子章节标题);另见 id. § 7513(a)、(b)、(d)、(e)(指针对联邦雇员采取的“诉讼”)。根据罗马书 iii 的交叉引用,“人事行动”包括第 23 章人事行动和第 75 章诉讼。在本意见中,我们使用“第 23 章
适用于 PIC32M MCU 的 MPLAB XC32 C/C++ 编译器用户指南
23.1. 概述................................................................................................................................................215 23.2. 翻译....................................................................................................................................215 23.3. 环境....................................................................................................................................215 23.4. 标识符....................................................................................................................................216 23.5. 字符....................................................................................................................................216 23.6. 整数.......................................................................................................................................217 23.7. 浮点数....................................................................................................................................217 23.8. 数组和指针....................................................................................................................................218 23.9. 提示....................................................................................................................................219 23.10. 结构、联合、枚举和位字段.............................................................................................219 23.11. 23.12. 限定符................................................................................................................................220 23.13. 声明符.................................................................................................................................220 23.14. 语句.................................................................................................................................220 23.14. 预处理指令.......................................................................................................................220 23.15. 库函数.................................................................................................................................221 23.16. 架构.................................................................................................................................225

Fusion系列
IRIS TM 相机定位系统................................................................................................................................................ 123 触摸屏.................................................................................................................................................................... 123 空气辅助.................................................................................................................................................................... 124 自动对焦与手动对焦....................................................................................................................................... 125 钥匙开关................................................................................................................................................................. 127 图像抖动................................................................................................................................................................. 127 红点指针.................................................................................................................................................................... 129 紧急停止按钮.................................................................................................................................................... 129 前检修门.................................................................................................................................................................... 129 任务板/真空压紧台..................................................................................................................................... 130 矢量切割台..................................................................................................................................................... 130 排气室..................................................................................................................................................................... 131 状态灯..................................................................................................................................................................... 131翻转标尺................................................................................................................................................................................ 131 中心雕刻.................................................................................................................................................................... 132 配准相机................................................................................................................................................................ 135 第 9 部分:可选功能 143

智能手势受控演示系统
betul。使用手势作为系统输入的抽象控制演示,本文构建了一个控制器。OPENCV模块主要用于控制此实现中的手势。MediaPipe是他的机器学习框架,该框架具有当前可用的手势识别技术。此系统主要使用网络摄像头捕获或录制照片和视频。此应用程序根据您的输入控制系统的外观。该系统的主要目的是修改演示幻灯片。我还可以访问一个指针,该指针使我能够借鉴并删除幻灯片。您可以使用手势来操作基本的计算机功能,例如演示控件。这意味着人们不必经常学习无聊的机械技能。这些手势系统提供了一种现代,想象力和自然的非语言交流方法。这些系统通常用于人类计算机交互中。该项目的目的是讨论手势识别的目的,讨论基于手动识别的示意力系统,以识别较高的系统来识别用户的识别a iS hand Is gest gest gest gest gest gest。识别人的手势并使用此信息来控制演示文稿。实时手势识别使某些用户可以通过在连接到计算机的系统摄像机前执行手势来控制计算机。本项目利用OpenCV Python和MediaPipe来创建手势表现控制系统。系统可以使用手势进行操作,而无需键盘或鼠标。关键字:OpenCV,MediaPipe,机器学习,手势识别,演示控制器,人类计算机交互(HCI)。I.在当今的数字环境中介绍,演讲是一种引人入胜且高效的策略,可帮助主持人说服和告知他们的受众。可以使用鼠标,键盘,激光指针等编辑幻灯片。缺点是控制设备需要先前的设备知识。几年前,与媒体玩家,机器人技术和游戏等软件进行交互时,手势识别变得越来越有用。手势识别系统促进了手套,标记和其他物品的使用。但是,这种手套和标记的使用增加了系统的成本。该系统提出的手势识别技术基于人工智能。用户可以编辑幻灯片。交互式演示系统使用最先进的人类计算机交互技术来开发更实用和用户友好的接口来控制演示显示。使用这些手势选项代替标准鼠标和键盘控件可以大大改善您的演示体验。使用身体运动通过手势表达特定消息是非语言或非声音通信。该系统主要是使用Python框架和技术(例如开放CV,CV区,Numpy和媒体管道)构建的。这种方法的目的是提高演示的有效性和实用性。此接口已此外,系统使用手势编写,撤消并将指针移至文本不同区域。为了改善幻灯片体验,我们希望允许用户用手势控制幻灯片。要优化和改善显示可移植性,系统可最大程度地减少外部接口的使用。使用机器学习,我们能够发现使用Python转化为操纵幻灯片的一些基本方法的手势的细微变化。幻灯片可以通过各种运动来管理和控制,例如左右滑动,拇指向上和暂停。系统使用基于手势的人机接口来传统演示流。