XiaoMi-AI文件搜索系统
World File Search System接触的

通过优化界面层厚度实现低肖特基势垒接触的 MoS2 晶体管
摘要:二硫化钼(MoS 2 )因其较大的带隙、良好的机械韧性和稳定的物理性能而受到研究者的广泛关注,成为下一代光电器件的理想材料。但较大的肖特基势垒高度( Φ B )和接触电阻是阻碍大功率 MoS 2 晶体管制备的障碍。详细研究了具有两种不同接触结构的 MoS 2 晶体管的电子传输特性,包括铜(Cu)金属-MoS 2 通道和铜(Cu)金属-TiO 2 -MoS 2 通道。通过调整金属和 MoS 2 之间的 TiO 2 夹层的厚度来优化接触。具有 1.5 nm 厚 TiO 2 层的金属-夹层-半导体(MIS)结构具有较小的肖特基势垒,为 22 meV。结果为设计 MIS 接触和界面以改善晶体管特性提供了参考。
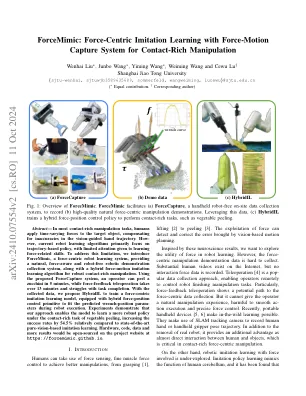
强制性:以力量捕获系统进行富含接触的操纵的力量仿真学习
摘要 - 在大多数接触式操纵任务中,人类将随时间变化的力应用于目标对象,以补偿视觉引导的手轨迹中的不准确性。,当前的机器人学习算法主要集中在基于轨迹的政策上,而对学习力相关的技能的关注有限。为了解决这一局限性,我们引入了以力为中心的机器人学习系统Forcemimic,提供了一种自然,吸引力和无机器人的机器人示范收集系统,以及用于强大接触富含接触良好的操作的混合力 - 动作模仿学习算法。使用拟议的forcapture系统,操作员可以在5分钟内剥离西葫芦,而力量反馈近距离运行则需要13分钟以上,并且在任务完成方面挣扎。使用收集的数据,我们提议Hybridil训练一个以力为中心的模仿学习模型,该模型配备了混合力位置控制原始的原始性,以适合机器人执行过程中预测的扳手位置参数。实验表明,我们的方法使该模型能够在蔬菜剥离的接触术任务下学习更强大的策略,与基于纯粹的纯粹的模仿学习相比,成功率相对增加了54.5%。硬件,代码,数据和更多结果将在项目网站https://forcemimic.github.io上开放。

从地面到对象:与地面接触的动态物体的粗到细节自我监督的单眼估计
自我监督的单眼深度估计(DE)是一种学习深度的方法,没有昂贵的深度地面真理。但是,它经常在移动物体上挣扎,这些物体违反了训练期间的静态场景假设。为了结束这个问题,我们介绍了一个粗到最新的训练策略,该策略利用了地面与先验接触的地面,该期望是在户外场景中大多数移动物体在地面上造成的。在粗糙的训练阶段,我们将动态类中的对象排除在再投入损失计算中,以避免深度学习不准确。为了对物体的深度进行精确的监督,我们提出了一种新颖的接地式差异平滑度损失(GDS-loss),该损失(GDS-loss)鼓励DE网络将物体的深度与其接地接触点保持一致。随后,在精细的训练阶段,我们完善了DE网络,以了解重新投影损失中对象的详细深度,同时通过使用基于成本量的加权因素利用我们的正则化损失来确保对移动对象区域的准确DE。我们的整体粗表表训练策略可以轻松地与无需修改的方法集成,从而显着提高了挑战性的城市景观和KITTI数据集的DE性能,尤其是在移动对象区域中。

集团前瞻性研究:跨计划净收入与毛收入比率(针对难以接触的视同措施客户)草案
表格清单 表 1-1. 已评估的 2019-2021 财年直接安装计划的合并 NTGR(按行业) ............................................................................. 2 表 1-2. 建议对 2026 财年的 NTG_ID 和 NTGR 进行更新 ............................................................................................. 4 表 2-1. 用于定义难以接触到的客户的人口统计和公司统计特征 ............................................................................................. 7 表 3-1. 2019-2021 财年难以接触到的客户的标准 ............................................................................................. 9 表 3-2 本研究中包括的计划和参与者数量 ............................................................................................................. 11 表 3-3. 使用三组标准的 HTR 和非 HTR 参与者 ............................................................................................................. 12 表 4-1. 合并的跨计划住宅 NTGR ............................................................................................................................. 16 表 4-2.合并跨项目商业 NTGR ...................................................................................................................... 18

与半导体二维电子系统的超导量子点接触的混合分裂栅极阵列中的量化电导率
量子点接触(QPC),这是具有量化电导的半导体二维电子系统中的收缩 - 是新型的Spintronic和拓扑电子电路的组合。QPC也可以用作量子纳米电路中的读数电子,电荷传感器或开关。与超导接触的短且无杂质的收缩是一种库珀对QPC类似物,称为超导量子点接触(SQPC)。由于维持其几何需求和接近统一的超导 - 触发器界面透明度的挑战,此类量子设备的技术发展已延长。在这里,我们开发了先进的纳米构造,材料和设备工程技术,并报告了纳米级混合SQPC阵列的创新实现,该阵列具有分开的栅极技术在半导体的2D电子系统中。我们利用了量子井的特殊门可调性,并证明了混合INGAAS-NB SQPC中电导量化的第一个实验观察。我们观察到在单个芯片中制造的多个量子纳米版本中的零磁场可重复的量化电导率,并系统地研究了在低和高磁场上SQPC的量子运输,以实现其在量子元学中的潜在应用,以实现极为准确的电压标准和缺陷量化技术。

美国能源部关于与联邦承认的印第安部落和阿拉斯加原住民索赔解决法案公司进行磋商和接触的政策
能源部 (DOE 或 Department) 的政策是承认并履行其法律义务,尊重和保护部落的自决权和固有主权;确定和保护部落信托资源;与联邦认可的印第安部落和《阿拉斯加原住民索赔解决法》(ANCSA) 公司(定义见 DOE 命令 144.1)中确定的实体建立独特的关系;并在 DOE 的行动可能影响部落利益时邀请印第安部落在政府间进行磋商。DOE 应真诚地与印第安部落接触,并邀请印第安部落在最早阶段和整个决策过程中进行磋商,以确保进行稳健、互动、决策前、信息丰富和透明的磋商。部落磋商应尽可能最大限度地寻求共识。

COVID-19 大流行之前和期间,根据合并症和疫苗接种状况,个人社交接触的时间趋势:基于人群的重复横断面调查
结果:合并症患者接触者数量从疫情前的平均 6.1(95% 置信区间为 4.9 至 7.3)显著下降至第一波疫情期间的 3.2(2.5 至 3.9),无合并症患者接触者数量从 8.1(7.3 至 9.0)显著下降至 2.7(2.2 至 3.2)。在第二波疫情中,合并症患者接触者数量少于无合并症患者,2020/2021 年圣诞节假期前存在显著差异(2.9(2.5 至 3.2)v 3.9(3.5 至 4.3);P<0.001)。在第三波疫情中,合并症患者(4.1,3.4 至 4.7)和无合并症患者(4.5,4.1 至 4.9;P=0.27)的接触者数量相似。这可以部分解释为,患有合并症的个体在接种第一剂疫苗后,其接触次数增加到了与没有合并症的个体的水平。
自我 - 螺旋联系人的概念网格
自助力的概念网格与基础架构支持计划中的自助力接触的项目的年度相关概念,必须基于自助率接触的框架条件来创建基础架构支持计划区域帐篷(IFP STZ)。报告通过年度结构化事实报告进行。站立:26.02.2025

嗜热菌 Cas9 的 HNH 核酸酶中静电接触的破坏会重新连接变构运动并增强高温 DNA 裂解
多结构域蛋白内的变构信号传导是空间上相距较远的功能位点之间通信的驱动因素。了解大型多结构域蛋白中变构耦合的机制是实现系统空间和时间控制的最有希望的途径。最近,CRISPR-Cas9 在分子生物学和医学领域的应用激增,这促使人们需要了解 Cas9 的原子级蛋白质动力学(这是其变构串扰的驱动力)如何影响其生物物理特性。在本研究中,我们使用核磁共振 (NMR) 和计算的协同方法来精确定位热稳定性 Geo Cas9 的 HNH 结构域中的变构热点。我们表明,K597 突变为丙氨酸会破坏盐桥网络,进而改变 Geo HNH 结构域的结构、变构运动的时间尺度和热稳定性。在广泛研究的中温 S. pyogenes Cas9 中,这种同源赖氨酸到丙氨酸的突变同样改变了 Sp HNH 域的动力学。我们之前已经证明,通过突变改变变构是 Sp Cas9 (e Sp Cas9) 特异性增强的来源。因此,这在 Geo Cas9 中可能也是如此。由 AIP Publishing 独家授权发布。https://doi.org/10.1063/5.0128815

清洁“食品接触表面”
时间:微生物可能通过器皿、砧板、温度计或其他与食物接触的表面从一种食物传播到另一种食物。用于潜在危险食品的与食物接触的表面和设备应全天根据需要进行清洁,但必须每 4 小时清洁一次,以防止微生物在这些表面上生长。冷藏温度会减缓细菌病原体的产生时间,因此无需每四小时清洁一次。与没有潜在危险的食物接触的器皿和设备的表面,如冰茶分配器、碳酸饮料分配器喷嘴、饮料分配电路或管线、自动售水设备、咖啡豆研磨机、制冰机和冰柜,必须定期清洁,以防止产生可能导致微生物积聚的黏液、霉菌或土壤残留物。