XiaoMi-AI文件搜索系统
World File Search System控制

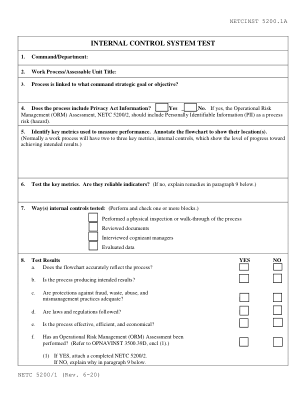
第 6 部分 - 内部控制
Error 500 (Server Error)!!1500.That’s an error.There was an error. Please try again later.That’s all we know.



项目管理、规划和控制
项目管理与生活的其他方面一样,不断变化和发展,因此,为了使教科书保持相关性,不可避免地必须定期更新以反映这些变化。在项目管理培训中,这些变化主要是考卷制定者或国家或国际标准编纂者认为的对特定主题的强调。软主题现在在考试问题中更为广泛,虽然这些主题并非项目管理所独有,但它们当然是良好一般管理的重要组成部分。行业是否同样重视其中一些重点主题尚有争议。尽管如此,第 6 版中还是纳入了一些变化,以使读者能够及时了解事件。
PrevEx 控制手册
PrevEx 以前是 670 系列分析仪,是 Control Instruments 的可燃性分析仪,用于监测下限可燃性。它的新名称彰显了其防爆能力,新外观为工业环境增添了情趣。最重要的是,它仍然解决了工业过程应用中的所有采样、测量和报告问题,同时保证了准确性、一致性和可靠性。PrevEx 可让您保护您的投资:它可确保您的设施、员工和环境安全,同时提高您的生产力并消除停机时间。由于其独特的火焰温度技术,其准确性超过任何其他分析仪,可提供最高程度的安全性。这种独特的设计基于传感火焰概念,该概念已被证明是业内最可靠的检测系统。与可能被污染、读数错误或直接失效的催化传感器不同,PrevEx 具有许多令人印象深刻的功能,即使在对几种不同可燃蒸汽的混合物进行采样时,也能确保无与伦比的安全性、极高的准确性和超快的响应时间。PrevEx 可燃性分析仪高效且经济,让您对其性能充满信心。毕竟,监测系统的好坏取决于它所采用的传感器!继续阅读以了解更多 PrevEx 的独家功能,并了解它如何真正防止火灾和爆炸。预防

(一)内部控制评审结果
兹提述本公司日期为(i)2023 年 4 月 28 日的公告(「该等公告」),有关复牌指引;(ii)2023 年 5 月 12 日,有关延迟刊发 2023 年第一季度业绩及延迟寄发 2023 年第一季度报告;(iii)2023 年 5 月 25 日、2023 年 11 月 21 日及 2024 年 1 月 4 日,有关额外复牌指引;(iv)2023 年 7 月 2 日、2023 年 10 月 5 日、2024 年 1 月 5 日及 2024 年 4 月 9 日,有关复牌状态季度更新;(v)2023 年 8 月 11 日,有关延迟刊发 2023 年中期业绩及延迟寄发 2023 年中期报告; (vi) 2023 年 11 月 14 日,有关延迟刊发 2023 年第三季度业绩及延迟寄发 2023 年第三季度报告;(vii) 2024 年 3 月 22 日,有关 2023 年第一季度业绩、2023 年中期业绩及 2023 年第三季度业绩;及 (viii) 2024 年 4 月 30 日,有关 2023 年第一季度报告、2023 年中期报告、截至 2023 年 12 月 31 日止年度的 2023 年第三季度报告及 2023 年年报(「2023 年年报」)。除另有说明外,本公告中使用的词汇与该等公告中定义的含义相同。

手册生产和控制...
应该强调的是,本手册仅旨在提供有关方法(最好是最不复杂的方法)的一般信息,以生产满足WHO要求的可接受质量疫苗并描述必要测试。存在其他生产方法,这可能会导致类似的结果。手册并不需要表达对所选择方法的任何偏爱,不应被视为对WHO首选的那些生产方法的描述。对于所有(Bio)化学预定的(手册中指定的)以及提到的制造商和特殊设备也是如此。
控制和组织文化
摘要 引言 巴西在反腐败斗争中取得了进展,采用了联合国和经合组织等机构推荐的国际标准。 《反腐败法》及其法令加强了商业道德和透明度,鼓励组织推行诚信计划。 CVM要求上市公司披露有关这些计划的信息,而B3则提倡差异化的公司治理和可持续发展实践。然而,2023 年 Americanas SA 等案例表明,即使是具有公认公司治理标准的组织也可能失败,这凸显了识别诚信计划中弱点的必要性。研究表明,除了正式控制之外,促进组织道德文化也至关重要。本研究提出了一种基于学术研究和机构指导的诚信计划分析模型,旨在帮助客观评估这些计划,并为巴西营造更加道德的商业环境做出贡献。理论基础 诚信计划的有效性取决于正式和非正式控制的结合。因此,有效的计划必须将道德价值观和原则融入日常运营中,超越法律合规,并促进支持道德行为的组织文化。至关重要的是,该计划要适应组织的文化背景,同时考虑正式结构和非正式的文化影响。道德准则、培训、报告渠道和审计等正式要素至关重要,但它们需要伴随着高层管理层的真正承诺。非正式因素(例如组织价值观和共同期望)营造出一种有利于道德行为的环境,从而有利于组织诚信。正式和非正式控制的整合对于诚信计划的有效性至关重要。非正式因素虽然主观且较难突出,但在指导决策和影响行为方面发挥着至关重要的作用。为了加强这些道德背景,建议使用可见的道德符号,并保持规范期望和管理行为之间的一致性。此外,即使没有明确理解规则,内化的社会和文化规范也可以促进一致性。因此,弘扬诚信文化对于积极影响员工行为和组织整体绩效至关重要。方法论 为了开发分析诚信计划的模型,我们采用了 30 多年来专家制定的学术研究建议和机构指南。诚信计划的主要组成部分分为 10 个维度,每个维度确定了组织采用实践的正式和非正式指标。接下来,指标与文件相关

机械臂可以由大脑控制吗?
我们将四个微电极阵列放入志愿者的大脑中。微电极阵列包含记录和产生神经信号的传感器。神经信号是身体使用的信息。它们与大脑之间传递信息。我们在控制手和手臂运动的大脑部分放置了两个阵列。这些阵列发送神经信号来控制机械臂。我们在接收来自手的信息的大脑区域放置了另外两个阵列。这些传感阵列发出神经信号。它们让我们的志愿者知道机械手何时接触到物体。