XiaoMi-AI文件搜索系统
World File Search System斜接
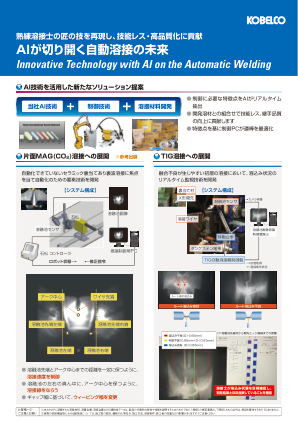
AI开启自动焊接的未来
① 本产品目录中记载的焊接材料、熔敷金属、焊缝金属等的性能数据,仅用于说明产品的典型性能和使用效果,不作为《标准》的规定。本产品目录中没有记载任何性能数据。应被解释为明示或暗示的保证。 ②请注意,实际焊接结构的性能受结构设计、钢板化学成分、施工方法、焊接条件、施工人员的技能等因素的影响。对客户的通知和要求
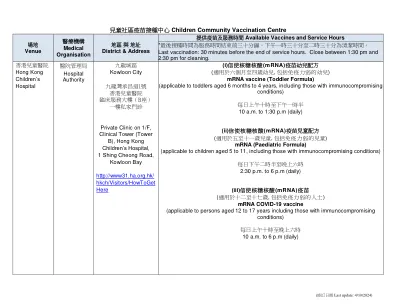
儿童社区疫苗接种中心儿童社区疫苗接种...
提供疫苗及服务时间 可用疫苗及服务时间 * 最后接种时间下午为服务时间结束前三十分钟。一时三十分至二时三十分为清洁时间。 最后一次接种:服务时间结束前 30 分钟。下午 1:30 至 2:30 期间关闭以进行清洁。 香港儿童医院 香港儿童医院

斜飞翼:简介和白皮书1
美国宇航局艾姆斯研究中心在 20 世纪 90 年代初对超音速商用客运斜翼全翼概念进行了设计研究。这项研究的参与者包括美国宇航局艾姆斯研究中心在斜翼设计方面拥有丰富经验的工作人员,以及来自西雅图波音商用飞机公司和加州长滩道格拉斯飞机公司的工程师,以及斯坦福大学的研究团队。行业合作的目的是确保将现实世界的设计约束纳入研究,并获得行业设计专业知识。斯坦福大学的团队建造并试飞了一架 17 英尺跨度的斜翼全翼无人机,展示了 3% 负静态稳定性的飞行。设计研究最终产生了两种机翼设计,称为 OAW-3 和 DAC-1。OAW-3 机翼由美国宇航局艾姆斯研究中心的团队设计,代表了基于配置约束和任务性能指标的高度优化设计。DAC-1 机翼由道格拉斯飞机公司的团队设计。它是一种经典的椭圆形平面形状,具有高度的气动形状优化,但设计并未根据整体任务性能指标进行优化。虽然两个机翼都在 9 x 7 超音速风洞中进行了测试,但只有 OAW-3 机翼拥有完整的控制面和发动机舱。本报告中描述的风洞数据仅在 NASA OAW-3 配置上获得。

三斜$ {\ rm(ca_ {0.85} ...
我们报道了最佳掺杂三斜铁的超级电阻器的准颗粒松弛动力学(Ca 0。85 LA 0。 15)10(pt 3 as 8)(fe 2 as 2)5,使用极化超快光泵探针光谱法t c = 30 k。 我们的结果揭示了夜间闪光引起的各向异性瞬态反射性在超过120 K以下,并且在超导状态下持续存在。 高泵功能下的测量值分别以1.6、3.5和4.7 THz的频率显示出三种不同的,相干的声子模式,分别对应于1 g(1),E G和A 1 g(2)模式。 高频A 1 g(2)模式对应于具有标称电子耦合常数λa 1 g(2)= 0的feas平面的C轴极化振动。 139±0。 02。 我们的结果表明,在低温下,超导状态和列表状态共存但相互竞争,并且有可能与1 g的声子与库珀对形成(Ca0。>)的形成。 85 LA 0。 15)10(pt 3 as 8)(fe 2 as 2)5。85 LA 0。15)10(pt 3 as 8)(fe 2 as 2)5,使用极化超快光泵探针光谱法t c = 30 k。我们的结果揭示了夜间闪光引起的各向异性瞬态反射性在超过120 K以下,并且在超导状态下持续存在。高泵功能下的测量值分别以1.6、3.5和4.7 THz的频率显示出三种不同的,相干的声子模式,分别对应于1 g(1),E G和A 1 g(2)模式。高频A 1 g(2)模式对应于具有标称电子耦合常数λa 1 g(2)= 0的feas平面的C轴极化振动。139±0。02。我们的结果表明,在低温下,超导状态和列表状态共存但相互竞争,并且有可能与1 g的声子与库珀对形成(Ca0。85 LA 0。 15)10(pt 3 as 8)(fe 2 as 2)5。85 LA 0。15)10(pt 3 as 8)(fe 2 as 2)5。

研究报告通过控制金属氧化物纳米结构实现高速充放电...
在750℃下烧成6小时以上,成为单斜晶WO 3 相。 P-2、P-3在烧成前为单斜晶系WO 3 、三斜晶系WO 3 、单斜晶系W 0.71 Mo 0.29 O 3 (PDF 01-076-1297),但在750℃下烧成6小时以上,变为单斜晶系W 0.71 钼 0.29 O 3 (PDF 01-076-1297) 和矩形 W 0.4 Mo 0.6 O 3 (PDF 01-076-1280)。 P-4在750℃下烧制24小时之前,单斜晶系W 0.71 Mo 0.29 O 3 (PDF 01-076-1297)、矩形W 0.4 Mo 0.6 O 3 和单斜晶系MoO 3 混合,但经过100小时后。煅烧后,MoO 3 峰消失,单斜晶系W 0.71 Mo形成了0.29 O 3 和矩形晶体W 0.4 Mo 0.6 O 3 。 P-5在烧成前为单斜MoO 3 (PDF PDF 00-047-1081),但烧成6小时以上后,变为具有层状结构的矩形MoO 3 (PDF 03-065-2421)。
斜飞翼:简介和白皮书1
美国宇航局艾姆斯研究中心于 20 世纪 90 年代初对超音速商用客运斜全翼概念进行了设计研究。这项研究的参与者包括美国宇航局艾姆斯研究中心在斜翼设计方面拥有长期专业知识的工作人员,以及来自西雅图波音商用飞机公司和加州长滩道格拉斯飞机公司的工程师,以及斯坦福大学的研究团队。行业合作的目的是确保研究中包含现实世界的设计约束,并获得行业设计专业知识。斯坦福大学的团队建造并试飞了一架 17 英尺跨度的斜全翼无人机,展示了 3% 负静态稳定性的飞行。设计研究最终产生了两种机翼设计,称为 OAW-3 和 DAC-1。OAW-3 机翼由 NASA Ames 团队设计,代表了基于配置约束和任务性能指标的高度优化设计。DAC-1 机翼由道格拉斯飞机公司的团队设计。它是一种经典的椭圆形平面形状,具有高度的气动形状优化,但设计并未根据整体任务性能指标进行优化。虽然两个机翼都在 9 x 7 超音速风洞中进行了测试,但只有 OAW-3 机翼拥有完整的控制面和发动机舱。本报告中描述的风洞数据仅在 NASA OAW-3 配置上获得。

离散波长 DOAS NO2 斜柱检索...
摘要。卫星 NO 2 数据在空气质量研究中的应用日益表明,需要进行具有更高空间和时间分辨率的观测。NO 2 昼夜循环研究、全球郊区观测和排放点源识别是一些重要应用的例子,而这些应用无法在现有仪器提供的分辨率下实现。提高空间分辨率的一种方法是减少检索所需的光谱信息,从而允许使用传统 2-D 探测器的两个维度来记录空间信息。在这项工作中,我们研究了使用 10 个离散波长和成熟的差分光学吸收光谱 (DOAS) 技术来检索 NO 2 斜柱密度 (SCD)。为了测试这个概念,我们使用了来自世界各地不同地区的单个 OMI 和 TROPOMI 1B 级扫描带,这些扫描带既包含清洁区域,也包含严重污染区域。为了离散化数据,我们模拟了一组以 NO 2 吸收截面的各个关键波长为中心的高斯光学滤波器。我们使用 DOAS 算法的简单实现对离散数据进行 SCD 检索,并将结果与相应的 2 级 SCD 产品(即 OMI 的 QA4ECV 和 TROPOMI 业务产品)进行比较。对于 OMI,我们离散波长检索的总体结果与 2 级数据非常吻合(平均差异 < 5 %)。对于 TROPOMI,一致性很好(平均差异 < 11 %),由于其信噪比更高,不确定性较低。这些差异主要可以通过检索图像的差异来解释

带斜齿轮的无弹性悬架技术
汽车的悬架系统在确保安全性和稳定性的同时提供平稳舒适的行驶方面起着至关重要的作用。传统悬架系统通常依靠机械弹簧来吸收路线的冲击和振动。但是,对利用替代技术(例如斜齿轮)进行悬浮和阻尼的弹簧悬架系统的兴趣越来越大。本文介绍了在弹簧悬架系统中使用斜角齿轮的探索。讨论了使用斜角齿轮代替传统弹簧的优势和挑战。斜角齿轮提供了紧凑而轻巧的解决方案,对悬架特征的精确控制以及对复杂性和维护要求的潜在降低。但是,需要解决诸如设计复杂性,耐用性和可靠性问题以及成本增加之类的挑战。审查了斜角齿轮的原理及其在悬架系统中的应用,并强调了该领域的现行研究和开发状态。讨论了提出的进一步研究的方法和方法,强调了这种概念在推进汽车悬架系统领域的意义。