XiaoMi-AI文件搜索系统
World File Search System旋转轴

GRB 191014c的新生黑洞证明它是活着的
多十年的理论效果已致力于找到一种有效的机制,用于使用Kerr-Newman Black Hole(BH)的旋转和电动力学可提取能,以为诸如γ-射线爆发(GRBS)和Active calactic untactic uneclei等最有能力的天体物理来源。我们显示了一个有效的一般相对论的电动力学过程,该过程发生在二进制驱动的超诺夫(Hypernova)的“内引擎”中。内部发动机由质量M的旋转KERR BH和无量纲的自旋参数α组成,强度B 0的磁场与旋转轴平行,并平行于旋转轴,以及非常低的密度离子化等离子体。在这里,我们表明,BH和磁场之间的引力磁相互作用引起了一个电场,该电场将来自环境的电子和质子加速到发射同步辐射的超层状能量。我们表明,在GRB 190114C中,质量m = 4的BH。4 m⊙,α= 0。4,B0≈4×10 10 g可以导致10 51 ERG S-1的高能量(GEV)发光度。内部发动机参数是通过要求(1)BH提取能解释了GEV和超弱的发射能量的确定的,(2)认为发射光子不受磁对生产的影响,并且(3)同步加速器辐射时间刻度与观察到的高emenergy TimeScale同意。我们发现GRB 190114C与BH旋转轴相对于BH旋转轴的半姿势角度大约60°的GEV能量清晰的喷射发射。

建模和预测周期性趋势的长期记忆
对古气候数据的时间序列行为的分析在近年来引起了很多关注。古气候数据是从在南极冰盖中钻取的核心收集的数据,这些冰盖测量了二氧化碳和甲烷的浓度以及冰中氘的含量,作为海洋温度的代理和冰的代理,冰的量约为800.000年。Paillard(2001)将这些值连接到Milankovitch轨道循环,这是在不同时期到达地球的太阳辐射的强度。变异来源是地球轨道的偏心率,地球旋转轴相对于轨道平面的倾斜度以及旋转轴的进动。Hays等。(1976),后来由Maslin(2016)审查,发现重大气候变化是由于倾斜和进攻的变化所致。
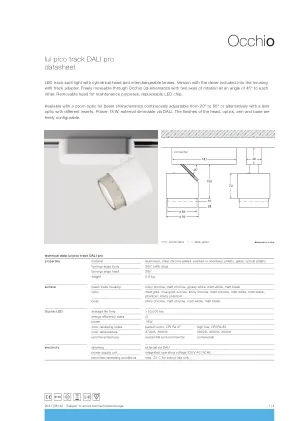
pico track DALI pro 数据表
LED 轨道聚光灯,带圆柱形灯头和可更换透镜。驱动器包含在带轨道适配器的外壳中的版本。通过 Occhio 3d 运动学可自由移动,两个旋转轴相互成 45° 角。可拆卸灯头用于维护,可更换 LED 芯片。
化学群体理论-II。晶体固体中的对称性
(1)晶体结构:识别分子和固体的结构对称性对于了解其物理和某些化学特性的性质很重要。分子对称性由一个点组总结,为此,所有对称元素(点,轴,平面)在一个固定点上相交,该固定点被分配为空间坐标系的起源。例如,考虑使用点组𝒟6h。起源在没有原子的分子中心。其一些对称元素包括六倍旋转轴和六个垂直镜面;相应的操作是由2π/6(60°)的倍数旋转和反射。晶体固体在空间中的多个点显示旋转对称性,因为这些结构也表现出转化周期性,这是由晶格描述的。旋转和翻译对称操作的组合产生了一个空间群。考虑石墨烯的结构,该结构由融合的六元环的平面网络组成。如果忽略了平面中结构的终止,则每个六角形的中心都有六倍的旋转轴,并且每个碳原子都与三倍的旋转轴相交。翻译周期性由连接每个六角形中心的单位单元(平行四边形)表示。作为另一个例子,Cenic 2的结构包含[NIC 2]的平面与[NIC 2]平面的七元环上方和以下的CE原子平面交替。在沿堆叠方向的该结构的投影中,单位单元格是一个矩形,垂直镜面显而易见。此外,这种晶体结构还有另一种类型的对称性操作,对于任何分子:滑动反射而不会发生,其中通过镜面的反射是平行于(沿着(沿着)反射平面的(“滑行”)的位移。自身反射或自身位移都不是对称操作,但是两个操作的组合是用于Cenic 2结构。

不可知期估计
量子计量学的目的是通过利用量子资源来提高测量的敏感性。计量学家通常旨在最大化量子渔民信息,从而界定测量设置的灵敏度。在对计量学的基本限制的研究中,范式设置具有量子(旋转半旋转系统),但受到未知旋转的影响。如果旋转以最大化旋转诱导操作员的方差开始的状态,则获得有关旋转的最大量子Fisher信息。如果旋转轴未知,则无法制备最佳的单量传感器。受封闭时间曲线的模拟启发,我们规避了这一限制。无论旋转轴如何,我们都会获得有关旋转角度的最大量子渔民信息。为了实现此结果,我们最初将探针量子纠缠在一起。然后,我们以纠缠的基础测量对,获得的旋转角度的信息比任何单个Qubit传感器都能实现的更多信息。我们使用两个Quibent的超导量子处理器证明了这一计量学优势。我们的测量方法实现了量子优势,表现优于每个无纠缠策略。

动力升级提升钻机效率,延长钻机寿命
SCR 钻机的钻台。在地面维修发动机也更安全。SCR 钻机的钻台噪音水平降低。而且没有滑轮、链条、旋转轴,重型起重也更少。将机械钻机转换为 SCR 还具有环保优势。SCR 钻机的燃料消耗减少了 20-30%。在可行的情况下,可以使用高压线电力来运行 SCR 钻机。机械钻机转换所涉及的工作范围包括:
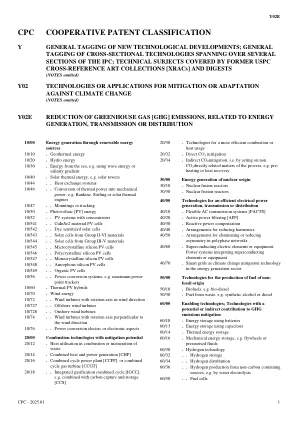
方案-Y02E.pdf
10/00 通过可再生能源发电 10/10 . 地热能 10/20 . 水能 10/30 . 海洋能,例如利用波浪能或盐度梯度 10/40 . 太阳热能,例如太阳能塔 10/44 . . 热交换系统 10/46 . . 将热能转化为机械能,例如朗肯发动机、斯特林发动机或太阳能热机 10/47 . . 支架或跟踪 10/50 . 光伏 [PV] 能 10/52 . . 带聚光器的光伏系统 10/541 . . CuInSe2 材料光伏电池 10/542 . . 染料敏化太阳能电池 10/543 . . 来自 II-VI 族材料的太阳能电池 10/544 .由 III-V 族材料制成的太阳能电池 10/545 . . 微晶硅光伏电池 10/546 . . 多晶硅光伏电池 10/547 . . 单晶硅光伏电池 10/548 . . 非晶硅光伏电池 10/549 . . 有机光伏电池 10/56 . . 电力转换系统,例如最大功率点跟踪器 10/60 . 热光伏混合能源 10/70 . 风能 10/72 . . 旋转轴与风向一致的风力涡轮机 10/727 . . 海上风力涡轮机 10/728 . . 陆上风力涡轮机 10/74 . . 旋转轴垂直于风向的风力涡轮机 10/76 . . 电力转换电气或电子方面

数控车削圆柱形零件同轴度误差分析及优化
摘要 在工业应用中,具有精确几何公差的高精度旋转轴通常在齿轮和壳体之间以微米级间隙安装。在大多数这些应用中,动态循环载荷是不可避免的,这会对关键部件的疲劳寿命产生不利影响。在加工过程中确保严格的尺寸公差和同轴度是非常可取的,因为它会影响许多应用中的旋转特性。因此,同轴度误差的控制在旋转轴和高精度机床中起着至关重要的作用。然而,使用高精度加工会大大增加制造成本。因此,一种能够潜在地减少同轴度误差的经济高效的加工工艺具有很高的工业重要性。本研究通过优化参数(切削速度、进给率、切削深度和切削刀具刀尖半径)尝试实现圆柱形加工零件的最小同轴度误差。计划进行实验,即中心复合设计矩阵和统计分析通过应用响应面法确定机器参数对高强度 Al 7075 合金同轴度误差的影响。进给率和切削深度因素对同轴度误差有显著影响。所有加工参数对同轴度误差均表现出非线性影响,这定义了强相互作用因素的影响。通过确定一组加工参数,即应用 Big-Bang 和 Big Crunch 以及 Rao(Rao-1、Rao-2 和 Rao-3)算法,使用推导出的经验方程来最小化同轴度误差。Rao 算法在计算量和解决方案精度方面均优于 Big-Bang 和 Big Crunch 算法。Rao 算法的结果经过实验验证,同轴度误差降低至 1.013 µm,与 CCD 实验相比提高了 72.6%。
圆柱形件数控车削加工同轴度误差分析及优化
摘要 在工业应用中,具有精确几何公差的高精度旋转轴通常以微米级的间隙安装在齿轮和壳体之间。在大多数此类应用中,动态循环载荷是不可避免的,这会对关键部件的疲劳寿命产生不利影响。在加工过程中确保严格的尺寸公差和同轴度是非常必要的,因为它会影响许多应用中的旋转特性。因此,同轴度误差的控制在旋转轴和高精度机床中起着至关重要的作用。然而,使用高精度加工会大大增加制造成本。因此,一种能够潜在地降低同轴度误差的经济高效的加工工艺具有很高的工业重要性。本研究试图通过优化参数(切削速度、进给速度、切削深度和切削刀尖半径)来实现圆柱形加工零件的最小同轴度误差。计划进行以下实验:中心复合设计矩阵和统计分析应用响应面法确定了机器参数对高强度 Al 7075 合金同轴度误差的影响。进给速度和切削深度因素对同轴度误差有显著影响。所有加工参数对同轴度误差均表现出非线性影响,这定义了强相互作用因素的影响。通过确定一组加工参数,即应用 Big-Bang 和 Big Crunch 和 Rao(Rao-1、Rao-2 和 Rao-3)算法,利用推导出的经验方程来最小化同轴度误差。Rao 算法在计算工作量和求解精度方面均优于 Big-Bang 和 Big Crunch 算法。通过实验验证了 Rao 算法的结果,同轴度误差降低了 1.013 µm,与 CCD 实验相比提高了 72.6%。
圆柱形件数控车削加工同轴度误差分析及优化
摘要 在工业应用中,具有精确几何公差的高精度旋转轴通常以微米级的间隙安装在齿轮和壳体之间。在大多数此类应用中,动态循环载荷是不可避免的,这会对关键部件的疲劳寿命产生不利影响。在加工过程中确保严格的尺寸公差和同轴度是非常必要的,因为它会影响许多应用中的旋转特性。因此,同轴度误差的控制在旋转轴和高精度机床中起着至关重要的作用。然而,使用高精度加工会大大增加制造成本。因此,一种能够潜在地降低同轴度误差的经济高效的加工工艺具有很高的工业重要性。本研究试图通过优化参数(切削速度、进给速度、切削深度和切削刀尖半径)来实现圆柱形加工零件的最小同轴度误差。计划进行以下实验:中心复合设计矩阵和统计分析应用响应面法确定了机器参数对高强度 Al 7075 合金同轴度误差的影响。进给速度和切削深度因素对同轴度误差有显著影响。所有加工参数对同轴度误差均表现出非线性影响,这定义了强相互作用因素的影响。通过确定一组加工参数,即应用 Big-Bang 和 Big Crunch 和 Rao(Rao-1、Rao-2 和 Rao-3)算法,利用推导出的经验方程来最小化同轴度误差。Rao 算法在计算工作量和求解精度方面均优于 Big-Bang 和 Big Crunch 算法。通过实验验证了 Rao 算法的结果,同轴度误差降低了 1.013 µm,与 CCD 实验相比提高了 72.6%。