XiaoMi-AI文件搜索系统
World File Search System旋钮

您故意这样做!人类机器人相互作用中旋钮效应的研究
摘要随着机器人的越来越聪明和自主的态度,机器人做出导致副作用的决策的情况将会增加。为了调查人类在这些情况下的故意判断,本研究检查了人类机器人相互作用中的旋钮效应。旋钮效应描述了这样一种现象,即行动的副作用不对称地影响人们的意图归因。检查了三种不同的药物(即人类,人形机器人,Android机器人),我们发现了人类药物和Android机器人的旋钮效应,但没有针对人形机器人。结果表明,随着机器人变得更加人性化,旋钮效应变得更加相关。此外,调解分析表明,旋钮效应的现有解释方法不能介导副作用对Android机器人中意图判断的影响。这项工作为有关机器人作为故意代理的辩论提供了重要的见解。
矿石旋钮矿超级基金场地杰斐逊,阿什县,北部......
美国环境保护署 (EPA) 制定了这项社区参与计划 (CIP),旨在告知社区并让社区参与有关 Ore Knob 矿超级基金场地(场地)的双向讨论。此 CIP 是根据 EPA 的超级基金* 计划制定的。它提供了有关社区关切的信息,并提出了一项计划,旨在随着场地调查和清理工作的进展,加强居民与 EPA 之间的沟通。EPA 超级基金社区参与计划的目标是让公众参与与超级基金场地清理相关的活动和决策。EPA 认识到在决策过程中积极征求社区意见和信息的重要性。公众意见可以发挥以下两种作用:
BIOS 设置实用程序 - 用户指南
• 更改 IPMI 安全策略旋钮。• 更新有关 PCIe Pll SSC 旋钮的帮助文本。• 更新有关系统时间旋钮的帮助文本。• 将 PFR Unprovision 字符串更改为 PFR UnProvision。• 从 PFR Status、PFR Lock Status、PFR Provision Status 中删除冒号。• 更改 Select Owner EPOCH Input Type 旋钮字符串。• 更改 Uncore Freq Scaling 帮助文本字符串。• 更改 AVX ICCP Pre-Grant Level 旋钮字符串。• 添加 OS Native AER Support 旋钮。• 添加 DBP-F 旋钮。• 添加 PPR Type 旋钮。• 从 PCIe ASPM Support (Global) 设置旋钮中删除 L1 only 选项。• 更新工具支持表。• 更正拼写错误。• 添加 AMT 相关旋钮。• 向 Mirror Mode 旋钮添加 Partial Mirror Mode 选项。• 添加 Partial Mirror size 相关旋钮。• 添加 Mirror TAD0 旋钮。• 添加 TPM FW 更新旋钮。

挑战者 300 飞行机组操作手册... - SmartCockpit
1.如果另一个菜单/列表处于活动状态,请按 DCP 上的 RADIO 按钮显示 MFD 收音机菜单。2.如果需要,请按 1/2 按钮交替选择 1 侧收音机和 2 侧收音机。3.转动 DCP 上的 MENU 旋钮,将收音机菜单上的选择框移动到收音机(COM、NAV、ATC/TCAS 等)要调谐的频率或频道。4.转动 DCP 上的 TUNE 旋钮,调谐所需的频率或频道。- 较大的(外部旋钮)调整小数点左侧的数字。- 较小的(内部旋钮)调整小数点右侧的数字。5.要激活新频率/频道: - 按下调谐旋钮中央的传输按钮。6.要更改模式、调整静噪和收音机的其他非调谐功能: - 转动 MENU 旋钮将选择框移动到适当的收音机(COM1、NAV2、ATC/TCAS 等)- 按下 DCP 上的 RADIO 按钮选择子菜单。- 转动 MENU 旋钮将选择框移动到子菜单上。- 转动 DATA 旋钮更改模式或选择选项(例如调谐模式、静噪级别、交通模式等)- 按下 PUSH SELECT 按钮浏览可用选项。(PUSH SELECT 按钮在选择选项时的作用与 DATA 旋钮相同)- 要退出子菜单,请按下 RADIO 按钮。显示屏返回到广播菜单。

NS-1X所有者手册
[潮湿]旋钮调节门的量和还原效应。当该旋钮一直顺时针旋转时,效果的衰减最大,这显然可以区分您的声音和沉默。当您希望沉默在动态上不同时,这是最佳的。逆时针旋转旋钮会减少效果的衰减,从而在您播放的声音和沉默更顺畅的情况下差异。当您轻声演奏时,例如在更精致的段落中,这是最佳的。

FAN2444 完全可调风扇运行定时器 IM.ai
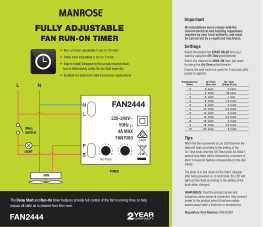
提示 当风扇通电时,拨盘之间的 LED 将根据开启时间旋钮的设置闪烁,然后是关闭时间旋钮:最初 1 秒长闪烁,随后是与拨盘值相对应的多次短 1/4 秒闪烁。

人类中央前手旋钮的髓鞘含量反映了生理和行为层面的手动运动控制个体差异
初级运动皮层手部区域 (M1 HAND) 和相邻的背侧运动前皮层 (PMd) 形成中央前回中的所谓运动手旋钮。M1 HAND 和 PMd 对于灵巧的手部使用至关重要,它们通过皮质皮层轴突紧密相连,缺乏清晰的分界线。在 24 名年轻的右利手志愿者中,我们进行了多模态映射,以描绘右侧运动手旋钮的结构和功能之间的关系。3 特斯拉的定量结构磁共振成像 (MRI) 产生了区域 R1 图,可作为皮质髓鞘含量的代理。参与者还接受了功能性磁共振成像 (fMRI)。我们绘制了与任务相关的激活和时间精度,同时他们执行一项视觉运动同步任务,该任务需要用左手食指或小指进行视觉提示的外展运动。我们还对运动手柄进行了脑沟对准经颅磁刺激,以确定在两个内在手部肌肉中诱发运动诱发电位 (MEP) 的最佳位置 (热点)。各个运动热点位置沿喙尾轴有所不同。中央前区冠部中的运动热点位置越靠喙,皮质运动 MEP 延迟越长。“热点喙部性”与中央前区冠部的区域髓鞘含量有关。皮质髓鞘含量还与视觉运动同步任务期间的中央前区冠部任务相关激活和时间精确度呈正相关。总之,我们的结果表明皮质髓鞘形成、皮质空间表征和手指运动的时间精确度之间存在联系。我们假设皮质轴突的髓鞘形成促进了 PMd 和 M1 HAND 中的神经元整合,从而促进了运动的精确时间。

可编程微生物墨水用于由基因工程蛋白质纳米纤维生产的生物材料 3D 打印
图 1. 微生物墨水的设计策略、生产和功能应用示意图。a. 大肠杆菌经过基因改造,通过将源自纤维蛋白的 a(旋钮)和 g(孔)蛋白质结构域与卷曲纳米纤维的主要结构成分 CsgA 融合来生产微生物墨水。分泌后,CsgA- a 和 CsgA- g 单体自组装成通过旋钮-孔结合相互作用交联的纳米纤维。b. 旋钮和孔结构域源自纤维蛋白,它们在血凝块形成过程中的超分子聚合中起关键作用。c. 从工程蛋白质纳米纤维生产微生物墨水的方案涉及标准细菌培养、有限的加工步骤以及不添加外源聚合物。微生物墨水经过 3D 打印以获得功能性活材料。

内核预测中的时间准确性权衡:控制...
内核回归或分类(也称为机器学习中的加权ϵ -NN方法)对它们的简单性有吸引力,因此在数据分析中无处不在。ever,内核回归或分类的实际实现包括量化或子采样数据以提高时间效率,通常是以预测质量为代价。尽管在实践中有必要进行这种交易,但它们的统计含义通常尚未得到充分的了解,因此实际实施的实施很少。特别是尚不清楚是否可以维持内核预测的统计准确性(在某些应用中至关重要),同时改善预测时间。目前的工作提供了将内核预测与数据量化相结合的指导原则,以确保预测时间和准确性之间的良好贸易,尤其是为了近似维持香草内核预测的良好准确性。此外,我们的贸易保证是根据调整参数明确处理的,该调整参数可以作为旋钮,该旋钮根据实际需求而定于时间或准确性。在旋钮的一端,预测时间与单个最近邻居预测的顺序相同(在统计上是不一致的),同时保持一致性;在旋钮的另一端,预测风险几乎是最小的(就原始数据大小而言),同时仍降低时间复杂性。理论结果在来自一系列现实世界应用域的数据上得到了验证;特别是我们证明了理论旋钮的性能如预期的。因此,分析揭示了数据定量化方法与内核预测方法之间的相互作用,最重要的是,显式地控制了对从业者的贸易,而不是提前或使其不透明。