XiaoMi-AI文件搜索系统
World File Search System无动
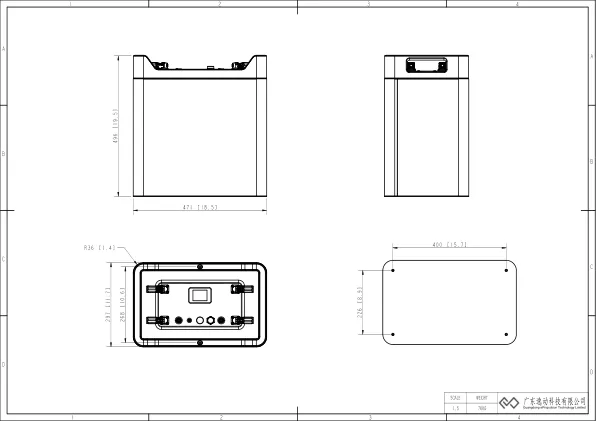
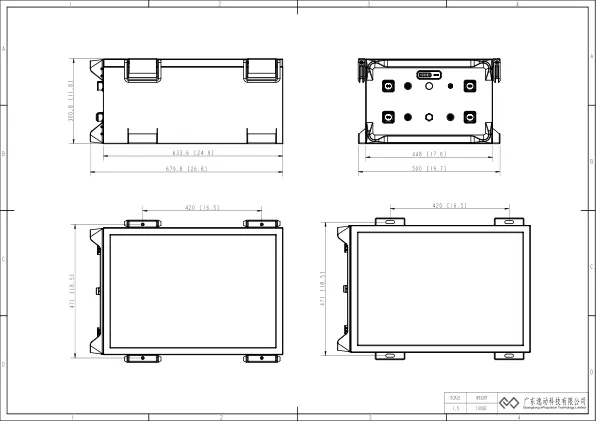


动作图
我们作为社区大学受托人必须练习和证明的领导类型与生成AI基于聊天的界面一样复杂:基于获得的知识和高级推理能力的结合,输出背后是无数计算。人工智能现在是如此无所不在,如此令人生畏,以至于理解我们值得我们反思智力本身的本质是值得的。智能是“学习,理解或处理新的或尝试的情况的能力”,“熟练使用理性”或“应用知识来操纵环境或通过客观标准(例如测试)衡量的知识的能力”,根据Merriam-Webster Dictionary的说法。除了定义,智力的概念是一个复杂的概念 - 当我们努力以智能管理我们的大学时,要牢记的事情。任何新手董事会服务的人都知道,一个人的学习和理解能力都会受到无数因素的测试 - 大学系统的动态,议会程序的动态,存在的政策以及制定政策的制定,甚至是基本角色,责任,责任以及董事会首席执行官的局限性。处理新的和尝试的情况?董事会服务在这方面永远不会挑战我们。我们获得并组装所有这些知识后,我们必须熟练,明智地运用我们的理由。我们必须能够评估,例如,政策和领导决定的合理政策和领导决定程度,多少

CUTANA™ 止动缓冲液
CUT&RUN 方法 CUT&RUN 使用 CUTANA™ChIC/CUT&RUN 试剂盒进行,起始于 500k K562 细胞,含 0.5 µg IgG(EpiCypher 13-0042)、H3K4me3(EpiCypher 13-0060)、H3K27me3(EpiCypher 13-0055)或 0.125 µg CTCF(EpiCypher 13-2014)抗体,一式两份。使用 CUTANA™CUT&RUN 文库制备试剂盒(EpiCypher 14-1001/14-1002)以 5 ng DNA(或回收总量,如果少于 5 ng)进行文库制备。文库在 Illumina NextSeq2000 上运行,采用双端测序(2x50 bp)。样本测序深度为 5.5/18.8 百万个读数 (IgG Rep 1/Rep 2)、14.2/17.0 百万个读数 (H3K4me3 Rep 1/Rep 2)、24.7/18.1 百万个读数 (H3K27me3 Rep 1/Rep 2) 和 8.6/5.5 百万个读数 (CTCF Rep 1/Rep 2)。使用 Bowtie2 将数据与 T2T-CHM13v2.0 基因组比对。过滤数据以删除重复、多比对读数和 ENCODE DAC 排除列表区域。

带电动汽车的消防安全
WP06 Effective Manual Operations Cur Fut Reg.i TRL Validation 6-A Manual screening of cargo fire hazards and effective fire patrols C F R 6-7 Onboard/Terminal 6-B Quick manual fire confirmation and localization C F 6-7 Onboard 6-C Efficient first response C 6 Onboard 6-D Effective and efficient manual firefighting C F 6 Onboard/Field WP07 Inherently Safe Design Cur Fut Reg.i TRL Validation 7-A Improved fire detection system interface design C R 5-6 Onboard/Virtual 7-B Efficient extinguishing system activation and inherently safe design C R 6 Onboard 7-C Firefighting resource management centre C F 6 Onboard/Virtual WP08 Ignition Prevention Cur Fut Reg.i TRL Validation 8-A Automatic screening and management of cargo fire hazards C F 5 Onboard/Shore 8-B Guidelines and solutions for safe electrical connections C F R 6-7新型RO-RO空间材料的板载8-C火灾要求C F R 6-7实验室WP09检测cur fut fut fut。 10-B Weather deck fixed fire-extinguishing systems C R 6 Onboard 10-C Updated performance of alternative fixed fire-fighting systems C R 6 Lab WP11 Containment Cur Fut Reg.i TRL Validation 11-A Division of ro-ro spaces C 5 Lab/Onboard 11-B Ensuring safe evacuation C R 6 Virtual/Shipyard 11-C Safe design with ro-ro space openings C R 6 Virtual/Lab 11-D Ro-ro space ventilation and smoke extraction C R 5-6实验室/板上


注意力缺陷多动障碍与
目的:注意力缺陷多动障碍 (ADHD) 和创伤后应激障碍 (PTSD) 经常共病,并具有共同的核心症状。然而,性别和性别相关因素显著影响其患病率、临床表现和诊断。在这里,我们进行了系统的文献综述和荟萃分析,以研究儿童期和成年期 ADHD/PTSD 共病的性别差异。方法:对 PsycINFO 和 PubMed 进行范围审查,得出 13 项符合条件的研究,并具有完整的结果数据。我们使用合并比值比 (OR) 和 95% 置信区间 (CI) 对 ADHD/PTSD 的性别分层患病率进行了固定效应荟萃分析。使用年龄作为子组进行固定效应亚组分析。使用 I 2 指数和 Cochran 的 Q 检验评估效应大小异质性。结果:在整个样本中(N= 13,585;F= 7005,M= 6580),女性 ADHD/PTSD 的诊断率明显高于男性(OR = 1.32,p = 0.02)。研究间异质性低至中等且不显著(I 2 = 41%;p = 0.06),验证了固定效应模型。年龄分层亚组分析显示,仅在成年人口中,女性 ADHD/PTSD 的几率高于男性(OR=1.41;p = 0.01)。此外,在以 ADHD 为主要诊断的研究中(OR = 1.60;p = 0.002),以及在采用结构化临床访谈作为诊断工具的研究中(OR = 1.46;p = 0.009),女性更有可能被诊断出患有这两种疾病。结论:我们的研究首次表明,女性中的 ADHD 和 PTSD 之间的关联更强,这表明 ADHD 可能以性别特有的方式增加 PTSD 的风险。

注视眼动的实际应用...
在各种各样的研究环境中,微扫视和其他注视眼球运动的记录为实际问题提供了见解和解决方案。本文,我们回顾了有关注视眼球运动(尤其是微扫视)在应用和生态有效场景中的文献。最近的技术进步使得在观察者执行各种任务时,可以在现实世界中进行非侵入式注视眼球运动记录。因此,注视眼球运动测量已在多种现实世界场景中获得,例如与驾驶员疲劳、宇航员前庭感觉剥夺和精英运动员训练等有关。本文,我们介绍了注视眼球运动研究的实际应用的最新进展,研究了其未来的潜在用途,并讨论了在现有眼球运动检测技术中加入微扫视测量的好处。当前证据支持将注视眼球运动测量纳入现实世界环境,作为开发新的或改进的眼球运动评估工具的一部分。随着价格实惠的高速、高空间分辨率眼动仪变得越来越普遍,注视眼球运动测量在现实世界中的应用只会变得越来越大、越来越广泛。

基于眼动的人 - 计算机...
1,2,3,4 Mahaguru技术研究所,Kattachira摘要:人类计算机互动(HCI)重点关注人员与计算机之间的界面和互动。 HCI的主要目标是设计一个使人们以新颖方式与计算机互动的环境。 人们用来互动的最重要方法之一是眼动和眼睛眨眼,尤其是对于身体残疾的人。 本文基于眼睛眨眼和面部运动提出了一种屏幕上的计算机交互方法。 这两个主要组成部分是图像处理,以检测眼睛,面部运动和闪烁的眼睛。 面部图像由计算机的相机捕获,然后用于确定眼睛位置和尺寸。 这是根据著名的“ 68点”和面部检测方法的面部网格系统完成的。 在此系统中使用眼睛眨眼来输入类似于用户按下键盘上的“ Enter”按钮的字符,并且使用面部运动来移动光标类似于使用鼠标的使用。1,2,3,4 Mahaguru技术研究所,Kattachira摘要:人类计算机互动(HCI)重点关注人员与计算机之间的界面和互动。HCI的主要目标是设计一个使人们以新颖方式与计算机互动的环境。人们用来互动的最重要方法之一是眼动和眼睛眨眼,尤其是对于身体残疾的人。本文基于眼睛眨眼和面部运动提出了一种屏幕上的计算机交互方法。这两个主要组成部分是图像处理,以检测眼睛,面部运动和闪烁的眼睛。面部图像由计算机的相机捕获,然后用于确定眼睛位置和尺寸。这是根据著名的“ 68点”和面部检测方法的面部网格系统完成的。在此系统中使用眼睛眨眼来输入类似于用户按下键盘上的“ Enter”按钮的字符,并且使用面部运动来移动光标类似于使用鼠标的使用。