XiaoMi-AI文件搜索系统
World File Search System无框


从组织发展框架到...
经过验证的工具:分析Swott,该部的咨询框架,会议,BE - – be -be -be -be Beetings,网络研讨会,研讨会,圆桌会议,合作协议。•通过定期分享结果和

框5:供应方估计
从长远来看,一个国家可以生产的商品和服务数量取决于经济的生产能力,后者由诸如劳动力规模,固定资本的库存以及这些资源的有效程度。这种能力量度称为经济的潜在产出。实际上,由于业务活动的波动,给定年份中的实际产出与其潜在产出很少相同。实际输出和潜在输出之间的差异称为输出差距,被认为是商业周期的度量。积极的产出差距表明经济暂时运作超出能力,通常导致通货膨胀增加,而负产出差距则表明经济下滑,通常与高失业率有关。从理论上讲,校准政策组合以最大程度地减少产出差距,因此避免过度失业和通货膨胀是政策以可持续方式提高生活水平的最有效方法之一。实际上,众所周知,实时估算输出差距是困难的。例如,有一系列指标(或负输出差距),例如失业率非常低,信用增长高,经常账户赤字或通货膨胀率。更正式地,数学模型可用于直接估计潜在的输出,因此可以使用输出差距。这个积极的产出差距主要由劳动力市场条件驱动,失业率接近纪录的低水平。该部门具有一系列估计方法,主要关注国内部门,以避免与MNC相关的扭曲 - 并纳入与商业周期有关的指标数据,例如失业率,通货膨胀和信贷增长。下面的基线系列(图14a)代表了方法范围的中点,这表明,国内爱尔兰经济的潜在产出增长平均每年超过2%,但较小但始终如一的积极的产出差距表示过度加热的某些要素。


salesforce数据保护的框
Rubrik(NYSE:RBRK)正在执行确保世界数据的任务。使用零信任数据安全™,我们帮助组织对网络攻击,恶意内部人员和操作中断实现业务弹性。Rubrik Security Cloud,由机器学习提供动力,可在企业,云和SaaS应用程序中确保数据。我们帮助组织维护数据完整性,提供可承受不利条件的数据可用性,不断监控数据风险和威胁,并在攻击基础架构时使用其数据恢复业务。
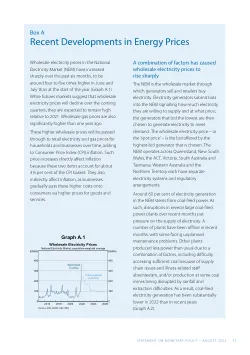
框 A:能源价格的最新发展
国家经济市场中燃煤发电量下降和电力需求增加导致更多使用成本更高的燃气发电厂来满足需求。2022 年初燃气发电成本几乎是 2021 年初的两倍,国内批发天然气价格在过去一年中从约 6 美元/GJ 上涨至约 11 美元/GJ(相比之下,2022 年初出口平价价格约为 40 美元/GJ)。然而,最显著的价格上涨发生在 5 月初,当时对燃气发电需求的增加推动国内批发天然气价格急剧上涨,到 5 月第二周达到 40 美元/GJ,此后一直保持在这个水平左右(图 A.3)。[1] 批发天然气投入价格上涨导致燃气发电成本进一步上涨,因此批发电价上涨。
AFR-RC74-INF-DOC-6框架上的进度报告...
背景1。每个人都可能在他们的一生中需要辅助技术。1在非洲地区,尽管有潜力减少贫困,提高生产力并促进个人的福祉,但需要辅助技术的人中有90-97%的人无法使用它。在这种情况下,成员国在2021年WHO非洲区域委员会的第71届会议上采用了区域框架来改善辅助技术的访问。2这是概述框架采用以来取得的进展的第一份报告。2。框架认识到辅助技术是实现普遍健康覆盖范围和应对紧急情况的关键。该框架进一步旨在实现以下目标:加强治理和政治支持,为所有人提供辅助技术;增加适当辅助产品的可访问性;提高各级合格人员的可用性;并扩大服务提供辅助产品的覆盖范围。3。2024年的里程碑针对:(i)40%的成员国对其辅助技术状况进行评估; (ii)40%的成员国制定了一项国家战略,以改善获得辅助技术的机会; (iii)40%的成员国建立了一个治理框架,以改善辅助技术的部门间协调; (iv)35%的成员国适应了安全提供辅助技术的技术指南和标准; (v)35%的成员国将质量保存的辅助产品供应纳入其国家采购计划。采取的进度/行动4。联合国儿童基金会 - 全球关于辅助技术的报告(GREAT)于2022年发布。3在35个国家 /地区进行的快速辅助技术(RATA)调查包括来自该地区4个国家的4个数据。根据该报告,非洲地区八个国家的人口中有10-15%无法获得辅助技术。的主要障碍包括缺乏意识和服务,自付支出,综合供应链薄弱以及卫生劳动力能力不足。该报告的建议用于支持成员国制定国家战略计划。作为该报告实施的一部分,动员资金(330万美元)以支持塞内加尔的战略计划。5。该地区5%的5%的国家评估了其辅助技术生态系统提供适当的辅助技术的能力,并使用WHO评估工具包在人群一级满足需求。该评估是17个国家5的基础,以制定循证和全面的政策和计划。
框架为开发和实施 - ...
2.1 VISION...................................................................................................................... 13 2.2 STRATEGIC AREAS OF IAI WORK PLAN IV............................................................. 13 2.3 FOOD AND AGRICULTURE...................................................................................... 16 2.4 TRADE促进..................................................................................................................... ACTIONS............................................................................................... 34
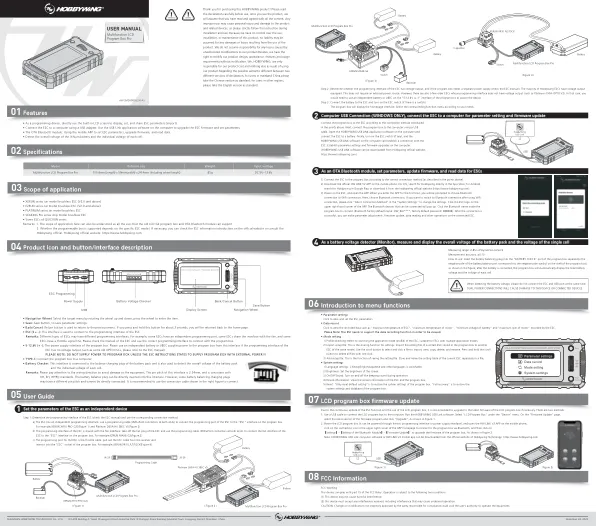
HW-SMD004DUL00-MULTIFUNCONT LCD程序框Pro- ...
•Quicrun系列的一些ESC备注:1。此处的应用程序范围也可以理解为旧的LCD G2程序框和OTA蓝牙模块可以支持的所有ESC。2。是否支持可编程框取决于特定的ESC模型。必要时,您可以在官方网站上查看ESC信息简介,或咨询业余爱好官员。hobbywing官方网站:https://www.hobbywing.com