XiaoMi-AI文件搜索系统
World File Search System时不变
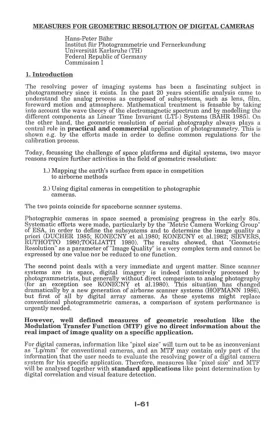
数码相机几何分辨率的测量方法
成像系统的分辨率自摄影测量出现以来就一直是摄影测量中一个令人着迷的课题。在过去的 20 年中,科学分析逐渐认识到模拟过程由镜头、胶片、前向运动和大气等子系统组成。通过考虑电磁波谱的波动理论并将不同组件建模为线性时不变 (LTI) 系统 (BAHR 1985),数学处理是可行的。另一方面,航空摄影的几何分辨率在摄影测量的实际和商业应用中始终发挥着核心作用。例如,为定义校准过程的通用规则而做出的努力就证明了这一点。

电气工程技术 - CPS (EET)
EET 3750. 线性系统。(3 小时)涵盖连续和离散系统的基本理论,强调线性时不变系统。考虑信号和系统在时域和频域中的表示。主题包括线性、时不变性、因果关系、稳定性、卷积、系统互连、正弦响应以及用于讨论频域应用的傅里叶和拉普拉斯变换。分析连续波形的采样和量化(A/D 和 D/A 转换),从而讨论离散时间 FIR 和 IIR 系统、递归分析和实现。开发了 Z 变换和离散时间傅里叶变换并将其应用于离散时间信号和系统的分析。

航空航天工程系
导航的几何概念、参考框架、坐标变换、变换方法比较。惯性传感器、惯性导航系统-机械化、外部辅助导航、组合导航。模块 4:制导简介(7 个讲座小时)导弹制导律;制导律的分类;经典制导律;现代制导律、自动驾驶仪 - 纵向、横向和导弹。模块 5:控制简介(8 个讲座小时)控制系统简介开环和闭环控制系统-传递函数极点和零点-框图简化-信号流图-梅森增益公式模块 6:系统稳定性(9 个讲座小时)特征方程-稳定性概念-劳斯稳定性标准根轨迹。经典线性时不变控制系统。稳定性;时域特性。航空航天系统的 PID 控制器设计。频域特性、奈奎斯特和波特图及其在航空航天系统控制器设计中的应用。教科书:

印度信息技术学院达尔瓦德印度信息技术学院...
电子与通信工程节点和网格分析、叠加、戴维南定理、诺顿定理、线性电路(RL、RC、RLC)的时间和频域分析连续时间信号:傅里叶级数和傅里叶变换、线性时不变系统:属性、因果关系、稳定性、卷积、频率响应二极管电路:削波、钳位、整流器、BJT 和 MOSFET 放大器:偏置、小信号分析、运算放大器电路:放大器、微分器、积分器、有源滤波器、振荡器、数字表示:二进制、整数、浮点数、组合电路:布尔代数、逻辑门、序贯电路:锁存器、触发器、计数器、数据转换器:采样和保持电路、ADC、DAC、机器指令和寻址模式、算术逻辑单元(ALU)、数据路径、控制单元、指令流水线、反馈原理、传递函数、框图表示、信号流图、数字调制方案:ASK、PSK、FSK、QAM、带宽和通信系统。
航空航天工程系
导航的几何概念、参考框架、坐标变换、变换方法比较。惯性传感器、惯性导航系统-机械化、外部辅助导航、组合导航。模块 4:制导简介(7 个讲座小时)导弹制导律;制导律的分类;经典制导律;现代制导律、自动驾驶仪 - 纵向、横向和导弹。模块 5:控制简介(8 个讲座小时)控制系统简介开环和闭环控制系统-传递函数极点和零点-框图简化-信号流图-梅森增益公式模块 6:系统稳定性(9 个讲座小时)特征方程-稳定性概念-劳斯稳定性标准根轨迹。经典线性时不变控制系统。稳定性;时域特性。航空航天系统的 PID 控制器设计。频域特性、奈奎斯特和波特图及其在航空航天系统控制器设计中的应用。教科书:

基于 LPV 模型的 eVTOL 飞机自适应 MPC 运行过程中...
摘要:本文将新颖的 LPV(线性参数变化)模型和 MPC(模型预测控制)方法应用于电动垂直起降飞机的倾斜过渡过程,该飞机具有六个分布式电动旋翼和固定翼,用于平飞,其中两个旋翼可倾斜以在从悬停到稳态平飞的倾斜过渡期间产生可变推力矢量,其余四个旋翼不能倾斜。在平飞过程中,固定翼引起的气动升力保持飞行高度。基于由倾转旋翼角位置和故障旋翼速度预定的标称倾斜轨迹,通过沿倾斜轨迹线性化非线性 eVTOL 飞机模型,基于显著减少的线性时不变模型数量构建了离散时间 LPV 模型,其中倾转旋翼角度和故障旋翼速度可以实时测量。提出了一种基于σ移位H 2 范数的LPV建模误差评估方法,并设计了具有动态参考补偿的自适应模型预测控制器。仿真研究表明,基于转子故障倾斜过渡LPV模型的自适应MPC策略是成功的。

结构化稳健综合在灵活飞机颤振抑制中的应用
摘要 — 本文介绍了一种针对具有参数和动态不确定性混合的系统的结构化鲁棒控制设计方法。所提出的方法在分析步骤和综合步骤之间交替进行。在分析步骤中计算参数不确定性的样本,从而产生仅包含动态不确定性的不确定系统阵列。然后在这个不确定模型阵列上合成控制器。此合成步骤本身涉及为每个不确定系统构建 D 尺度和为整个缩放对象集合调整单个控制器之间的交替。控制器调整使用结构化控制设计技术执行。所提出的方法用于设计柔性飞机的颤振抑制控制器。飞机动力学由高保真模型和降阶模型描述。颤振抑制的设计目标是在存在混合不确定性的情况下实现稳健稳定。所提出的结构化设计方法产生了一个单一的、低阶的、线性时不变 (LTI) 控制器,可将颤振速度提高 15%。提供了额外的稳健性分析和高保真模拟来评估控制器性能。

结构化稳健综合在柔性飞机颤振抑制中的应用
摘要 — 本文介绍了一种针对具有参数和动态不确定性混合的系统的结构化鲁棒控制设计方法。所提出的方法在分析步骤和综合步骤之间交替进行。在分析步骤中计算参数不确定性的样本,从而产生一组仅包含动态不确定性的不确定系统。然后在此不确定模型阵列上合成控制器。此合成步骤本身涉及交替为每个不确定系统构建 D 尺度和为整个缩放对象集合调整单个控制器。控制器调整是使用结构化控制设计技术执行的。所提出的方法用于设计柔性飞机的颤振抑制控制器。飞机动力学由高保真度和降阶模型描述。颤振抑制的设计目标是在存在混合不确定性的情况下实现鲁棒稳定性。所提出的结构化设计方法产生了一个低阶线性时不变 (LTI) 控制器,可将颤振速度提高 15%。提供了额外的鲁棒性分析和高保真模拟来评估控制器性能。
结构化稳健综合在柔性飞机颤振抑制中的应用
摘要 — 本文介绍了一种针对具有参数和动态不确定性混合的系统的结构化鲁棒控制设计方法。所提出的方法在分析步骤和综合步骤之间交替进行。在分析步骤中计算参数不确定性的样本,从而产生一组仅包含动态不确定性的不确定系统。然后在此不确定模型阵列上合成控制器。此合成步骤本身涉及交替为每个不确定系统构建 D 尺度和为整个缩放对象集合调整单个控制器。控制器调整是使用结构化控制设计技术执行的。所提出的方法用于设计柔性飞机的颤振抑制控制器。飞机动力学由高保真度和降阶模型描述。颤振抑制的设计目标是在存在混合不确定性的情况下实现鲁棒稳定性。所提出的结构化设计方法产生了一个低阶线性时不变 (LTI) 控制器,可将颤振速度提高 15%。提供了额外的鲁棒性分析和高保真模拟来评估控制器性能。