XiaoMi-AI文件搜索系统
World File Search System标为


AIRC在标题为
pec:chiarazictella@pec.it orc ID:0000-0001-9047-1575 Scopus作者ID:57217001202当前位置2024年4月2024年 - 托迪:AIRC在该项目中授权的项目中,该项目有权:“在不编码的RNA H19 ins in in in in in in in in in in in in forne forne colon rna H19中,生物医学,神经科学和高级诊断(BI.N.D) - 巴勒莫大学生物化学实验室(UNIPA)。以前的职位2020-FEB 2024:博士学位。该项目中实验性肿瘤学和手术的学生的标题为:“对非编码RNA(INCH19和miR-675)控制肿瘤进展的分子机制的研究和对结直肠癌药物治疗的抗性”,bi.n.d- unipa。博士的日期学位23/02/2024。2020年1月至1020年:该项目的研究生研究员题为:“研究非编码RNA H19及其基因内miR-675-5p之间的相互作用:原发性或转移性结肠癌的新目标”,de.bi.n.d -unipa; 2019年10月至12月:细胞和分子生物学实验室,生物学和遗传学部分的研究生自愿实习 - 部门bi.n.d -unipa。教育和培训2020年11月 - 2024年:博士学位在实验肿瘤学和手术中 - 周期XXXVI,系BI.N.D-细胞和分子生物学,生物学和遗传学部分,Unipa。2023年11月:作为生物学家实践的许可(A节)。评估:50/50。2017-19:医学与分子医学硕士学位(LM-9),医学与外科学院-Unipa。硕士学位的日期18/10/2019,评估:110/110兼豪华奖。2014-17:Unipa生物科学学士学位(L-13)。学士学位的日期18/10/2017。

对标国际电池政策
9.其他国家电池相关政策目标概览 �������������������������������� 87 9.1.英国 ���������������������������������������������������������������������������������������������������������������������������������������������������������������� 88 9.2.法国 �� ...以色列 �������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������� 89 9.4.加拿大 �� ...印度 ................................................................................................................................................ 90


OMG 人工智能标准是时候定义...
对象管理组织 ® (OMG ® ) 已建立 AI 标准化倡议。OMG 是行业、学术界、政府和非营利组织聚集在一起制定此类标准的最佳场所,因为它在知识表示、本体和机器人技术领域做出了开创性的工作,并且在过去 30 年中积累了制定标准的最佳实践。

标准是质量管理的核心
建立 QMS 需要时间、考虑和每位员工的参与,但会收获短期和长期的回报。高级管理层应发挥带头作用,展示组织对质量的新关注,并支持员工,他们的角色和职责可能会随着 QMS 的使用而发生变化。从开始到结束,嵌入 QMS 有 6 个关键步骤。
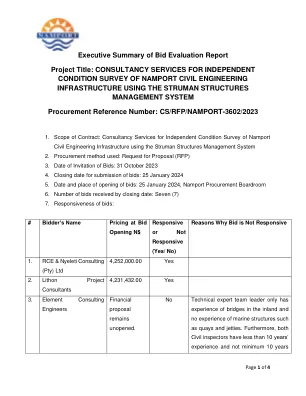
评标报告摘要 项目名称
技术得分 80.00 95.00 100.00 85.00 100.00 财务提案(NAD) 4,252,000.00 4,100,502.00 5,556,191.25 5,132,524.50 18,903,000.00 10% 的 WHT 130,930.00 总财务提案(NAD) 4,231,432.00 财务得分 99.52 100.00 76.16 82.44 22.38
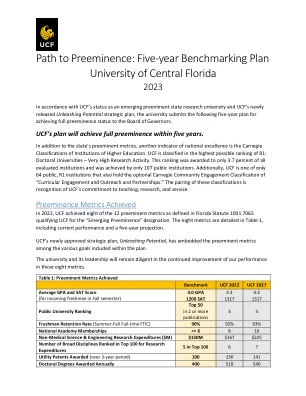
卓越之路:五年对标计划
UCF 已经实现了两个相关的卓越指标,非医学科学和工程研究支出达 1.5 亿美元,八个研究学科中的六个在公立和私立机构中支出排名前 100。实现这些指标证明了 UCF 在 STEM 研究支出方面的全国表现。在 2022 财年,UCF 重新分配了 700 万美元的经常性资金和 2600 万美元的非经常性资金用于研究设备、基础设施和旨在产生重大影响的长期创新。传染病和旅行健康、数字孪生、太空教育和工业化、零碳能源、人工智能和下一代计算硬件等领域受益于经常性投资。到 2027 年,科学和工程研究总支出预计为 2.65 亿美元。
铜的未来 - 标普全球
充分获取某些“关键矿物”对于实现到 2050 年消除全球净二氧化碳 (CO 2 ) 排放的广泛承诺至关重要(尽管中国和印度等主要排放国分别将目标定为 2060 年和 2070 年)。 2 实现这些目标的重中之重是实现全球汽车电气化并积极转向可再生能源发电,这是能源转型的两个主要方面。 3 虽然各种金属和稀土元素已经受到政府、媒体、智库和大学的极大关注,但最被低估的关键矿物之一也是最熟悉和最基本的矿物之一——铜。更深层次的电气化需要电线,而电线主要由铜制成。此外,铜矿床通常含有其他关键矿物,这些采矿作业会产生大量其他金属的副产品,例如钴、钼和镍。