XiaoMi-AI文件搜索系统
World File Search System标准接口

机器人操作标准接口 (SIROM):SRC H2020
欧洲已将空间机器人技术视为提高欧洲空间部门竞争力的关键技术。因此,欧盟通过“地平线 2020”计划资助了 PERASPERA 项目,该项目旨在提供关键的支持技术并演示用于在轨卫星服务和行星探索的自主机器人系统。PERASPERA 的目标是为空间机器人技术战略研究集群 (SRC) 制定活动路线图。SRC 的总体目标是在 2023/2027 框架内提供关键的支持技术并大规模演示用于在轨卫星服务和行星探索的自主机器人系统。这些活动通过连续的呼叫进行,以实现这些长期目标。呼叫 1(2016-2017)旨在开发将在后期阶段使用的五项关键技术或“构建模块”。它们是:

STANAG 4586–北约无人机互操作性 UCS 标准接口
无人驾驶飞行器 (UAV) 正在改变军事和民用作战的方式。不同供应商的新型飞行器不断被开发,每种飞行器都有自己的规格和特点。这种多样性导致互操作性方面的难度增加。STANAG 4586 的目标是指定为实现不同无人机系统之间所需的互操作性水平 (LOI) 而应实现的接口,以满足北约国家定义的作战概念 (CONOPS) 的要求。STANAG 4586 为无人机控制系统 (UCS) 建立了功能架构,包括以下元素和接口:飞行器 (AV)、飞行器专用模块 (VSM)、数据链路接口 (DLI)、核心 UCS (CUCS)、指挥和控制接口 (CCI)、人机接口 (HCI) 和指挥和控制接口专用模块 (CCISM)。除了 STANAG 4586 之外,已经有许多适用于 UAV 的现有或新兴标准化协议 (STANAG)。它们为可互操作数据链路 (STANAG 7085)、有效载荷和数据链路的 UAV 元素之间的数字传感器数据 (STANAG 7023、4545、4607 和 4609) 以及机载记录设备 (STANAG 7024 和 4575) 提供标准。尽管 STANAG 4586 没有提供完整的互操作性解决方案,但它无疑是朝着这个方向迈出的重要一步,为未来的发展提供了路线图。
ALR-400 雷达警告接收器 - Indra
通过减少零件数量和大量使用 COTS(包括可编程处理器),结合快速 COTS 插入方法,ALR-400 具有更高的可靠性、更低的生命周期成本和增强的可支持性。开放式架构提供模块化隔离标准接口,例如 MIL-STD-1553B、通信串行端口、USB、ARINC-429 和 100BaseT 快速以太网。雷达警告处理器可以承载防御辅助计算机 (DAC) 功能,从而实现控制和集成,
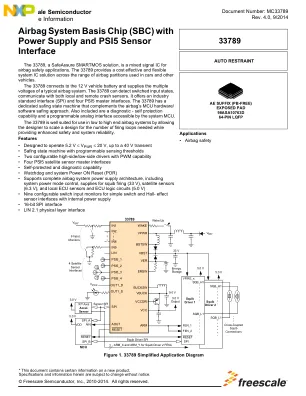
MC33789,带电源和 PSI5 传感器接口的安全气囊系统基础芯片 (SBC) - 数据表
33789 连接至 12 V 车辆电池,并为典型安全气囊系统提供多种电压。33789 可以检测切换的输入状态,与本地和远程碰撞传感器进行通信。它提供行业标准接口 (SPI) 和四个 PSI5 主接口。33789 具有专用的安全状态机,可补充安全气囊的 MCU 硬件/软件安全方法。还包括诊断 - 自我保护功能和系统 MCU 可访问的可编程模拟接口。
动态语义互操作性及其验证...
• 未来国防部指挥与控制系统 – 不仅需要与其他指挥与控制系统交换数据并进行数据互操作, – 还需要在任务和使命方面与其他指挥与控制系统协作。 • 虽然当前的互操作性技术(如标准接口和本体)对于语义互操作性至关重要,但它们还不够,因为: – 当前的接口技术仅为单一服务提供方法签名。 – 这些方法签名没有为另一个新系统或用户提供足够的信息以正确使用该服务,例如 • 此服务方法之间的正确调用顺序是什么 • 一个服务或另一个服务的方法之间的依赖关系是什么。

ROCK-2 坚固型 3U OpenVPX 任务计算机箱
BuiltSAFE AVIO-2353 是一款 3U OpenVPX 主板,具有丰富的航空电子 I/O。它具有 MIL-STD-1553、ARINC-429、RS232/422/485 和 GPIO,可提供用于与航空电子设备和其他处理子系统的电子传感器进行通信的所有标准接口。利用 Mercury FlexIO™ 技术,BuiltSAFE AVIO-2353 引脚排列可根据特定应用要求进行定制(I/O 数量和类型)。AVIO-2353 可通过 OpenVPX PCIe 总线或安装在其 XMC 夹层站点上的 XMC SBC(MFCC-8558)驱动。AVIO-2353 在设计时充分考虑了 DAL 认证,可选择配备认证套件,以确保成功通过认证,从而获得 DO-178C/DO-254 DAL-C 认证系统。• DAL-C/A (DO-178C/DO-254)

公用事业规模的储能电池架
CAN 是一种双线(双绞线)双向串行总线通信方法,允许电子子系统连接在一起并在网络中交互(Zerynth 文档)。此通信标准有各种连接器和电缆选项。M12 连接器和电缆被视为标准接口,因为它具有广泛的产品组合、安装人员熟悉度和 IP 等级。产品包括带飞线的面板安装、以太网面板安装和设备侧的 PCB 安装。在电缆/插头侧,有螺纹版本以及推拉式版本,以实现更快的连接。直角方向有利于缩短突出部分,如果从侧面撞击,则不易被剪断。如果工厂包覆成型,M12 连接器可以选择集成屏蔽和电缆上的高级屏蔽技术。

呼吁进行 iod-iov 实验-2022- ...
操作、时间配置文件、所需时间参考/同步等。实验将通过数据链路与航天器的航空电子设备连接。一个链路将用于实验的指挥和管理(小型卫星平台或立方体卫星标准接口的典型数据总线),如果需要,将提供一个高比特率链路用于数据收集,最大典型数据速率为 100 Mb/s。使用这些链路,实验将能够访问至少 TBD Gbit 的数据存储。在选择航天器时将提供接口的详细规范。数据将被转储到 TBD 位置的主地面站。注意:其他特定接口应由实验本身(独立实验)生成,因为不能保证由航天器提供。

多用途 elsA 流求解器概述
elsA 软件的开发始于 1997 年,当时 Onera 公司开始开发用于复杂外部和内部流动空气动力学和多学科应用的软件。由于 elsA 的多用途特性,许多常见的基本 CFD 功能可以被广泛的航空航天应用所共享:飞机、直升机、涡轮机械、导弹、发射器……elsA 软件基于面向对象的设计方法和基于三种编程语言的面向对象实现:C++、Fortran 和 Python。elsA 的互操作性策略基于一种组件方法,该方法依赖于 CFD 模拟组件的标准接口。本文概述了 elsA 软件在建模、网格拓扑、数值和边界条件方面的功能,而这些功能的更详细描述已在本期电子期刊的配套论文中给出。本文概述了高性能计算活动的重要性。