XiaoMi-AI文件搜索系统
World File Search System每层

分子动力学研究
摘要:具有各向异性热传导特性的材料,由分子尺度结构确定,提供了一种控制纳米级空间中热流的方法。因此,在这里,我们考虑逐层(LBL)膜,它们是多层聚电解质多层的静电组装,预计将在跨平面和平面内方向之间具有不同的热传导特性。我们构建了由带电的固体壁夹住的聚丙烯酸)/聚乙基亚胺(PAA/PEI)LBL膜的模型,并使用分子动力学模拟研究了其各向异性热传导。在跨平面方向上,固体壁和LBL膜之间的热边界电阻以及组成型PAA和PEI层之间的热边界电阻随着电离程度的增加(固体表面电荷密度和每个PAA/PEI分子的电荷数)减小。当电离程度较低时,组成层的跨平面导热率高于块状状态。随着电离程度的增加,线性聚合物PAA的跨平面导热率会降低,因为面式内部的聚合物链的数量增加。在平面内方向上,我们研究了每层的热传导,并发现由于面内链对准,再次发现有效的内部直导导热率。■简介高级热管理是工业领域中常见且不可避免的挑战。1与成分聚合物的散装状态相比,LBL膜中的热传导是三维增强的,因为跨平面方向的静电相互作用和平面方向上的分子比对。热界面材料(TIM)通常插入两个组件(例如热源和水槽)之间,从而有效的热传递从一种到另一个,即减少热电阻。随着高性能设备(例如功率模块)的热产生密度的增加,需要进一步改善TIM。通常,各种类型的热油脂,弹性体,凝胶或相变材料用于TIMS,由聚合物组成,由聚合物组成,具有高热传导性,例如金属,陶瓷和碳材料等偶尔会添加。

Saltus探针类太空任务:天文台建筑和任务设计
摘要。我们描述了单个光圈大型宇宙研究(Saltus)任务的空间天文台结构和任务设计,国家航空航天及空间管理局(NASA)天体物理学探测器资源管理器的概念。Saltus将使用直径<45 K的主要反射器(M1)来解决关键的远红外科学,并将为行星,太阳系和银河进化研究和宇宙起源提供前所未有的光谱灵敏度。从诺斯罗普·格鲁曼(Northrop Grumman)广泛的NASA任务遗产中绘制,天文台飞行系统基于Leostar-3航天器平台,以携带盐盐有效载荷。有效载荷由通货膨胀控制系统,阳光模块(SM),冷校正器模块(CCM),温暖仪器电子模块和Primary反射器模块(PRM)组成。14-m M1是一种由两层阳光射线(每层约1000 m 2)冷却的轴膜片放射线。CCM校正了M1的残留差,并将聚焦的光束传递给两种仪器 - 高分辨率接收器(HIRX)和Safari-lite。CCM和PRM居住在基于桁架的复合甲板上,该甲板还为态度控制系统提供了一个平台。Saltus 5年的任务寿命是由两个可消耗的档案馆驱动的:推进剂系统和通货膨胀控制系统。核心界面模块(CIM)是一种多面复合桁架结构,提供了一个载荷路径,具有高刚度,机械附件和有效载荷和航天器之间的热分离。SM附着CIM外,其后端直接集成到总线上。航天器在太阳线方面保持了M1的态度的态度,以促进<45 K的热环境。盐盐将驻留在阳光下 - 地球光环2轨道,最大地球倾斜范围为180万公里,从而减少了轨道转移Delta-V。瞬时视野在黄道杆周围提供了两个连续的20度查看区域,从而在6个月内实现了全天空覆盖率。

用于闭环刺激和记录自由移动人体中单个神经元和局部场电位活动的可穿戴平台
图 1. Neuro-stack 平台。a、用于单神经元和局部场电位 (LFP) 记录以及闭环可编程锁相 (PLS) 刺激的 Neuro-stack 和基于 GUI 的平板电脑。平板电脑可以选择记录和刺激通道、采样率、单极/双极记录和其他参数。显示的是封装(左)和未封装(右)版本。b、Neuro-stack 由三个堆叠层组成:1)通信 (Comm)、2) 数字和 3) 模拟。展示的是印刷电路板 (PCB,尺寸 = 90×60 mm 2 ) 和 5×2 引脚(8 个通道、1 个参考和 1 个接地,共 10 个引脚)Omnetics 探头连接器,可连接微电极(仅连接顶部模拟层)。请注意,每个模拟层最多接收两个 Omnetics 连接器,以通过一个探头连接最多 4 个电极。显示了每层的高级框图(右)。通信层包含一个 FPGA(现场可编程门阵列),用于介导外部软件和集成电路 (IC) 芯片之间的命令和数据传输(通过 USB)。数字层包含 PLS IC。模拟层包含用于感测(Sense IC)和刺激(Stim IC)的芯片。显示三个模拟层以允许记录 192 个通道(64 x 3 层)。串行外围设备接口 (SPI) 用于 FPGA 与 Sense 和 Stim IC 的通信,移位寄存器用于 FPGA 与 PLS 和 Spike IC 的通信。c,神经堆栈连接到佩戴眼动追踪系统的参与者的微电极。d,显示用于宏电极的 10 针防触摸跳线和用于微电极记录的 10 针连接器(例如 Adtech)。e,使用临床监测系统(Nihon Kohden,灰色)和神经堆栈(黑色)同时记录的示例数据显示信号相似。 f,数据(e)中功率谱图示例,显示一致的活动模式。使用对数刻度显示频率(0.1-32 Hz)。g,数据(e)中归一化功率谱密度(PSD)图示例。

用于闭环刺激和记录自由移动人体中单个神经元和局部场电位活动的可穿戴平台
图 1. Neuro-stack 平台。a、用于单神经元和局部场电位 (LFP) 记录以及闭环可编程锁相 (PLS) 刺激的 Neuro-stack 和基于 GUI 的平板电脑。平板电脑可以选择记录和刺激通道、采样率、单极/双极记录和其他参数。显示的是封装(左)和未封装(右)版本。b、Neuro-stack 由三个堆叠层组成:1)通信 (Comm)、2) 数字和 3) 模拟。展示的是印刷电路板 (PCB,尺寸 = 90×60 mm 2 ) 和 5×2 引脚(8 个通道、1 个参考和 1 个接地,共 10 个引脚)Omnetics 探头连接器,可连接微电极(仅连接顶部模拟层)。请注意,每个模拟层最多接收两个 Omnetics 连接器,以通过一个探头连接最多 4 个电极。显示了每层的高级框图(右)。通信层包含一个 FPGA(现场可编程门阵列),用于介导外部软件和集成电路 (IC) 芯片之间的命令和数据传输(通过 USB)。数字层包含 PLS IC。模拟层包含用于感测(Sense IC)和刺激(Stim IC)的芯片。显示三个模拟层以允许记录 192 个通道(64 x 3 层)。串行外围设备接口 (SPI) 用于 FPGA 与 Sense 和 Stim IC 的通信,移位寄存器用于 FPGA 与 PLS 和 Spike IC 的通信。c,神经堆栈连接到佩戴眼动追踪系统的参与者的微电极。d,显示用于宏电极的 10 针防触摸跳线和用于微电极记录的 10 针连接器(例如 Adtech)。e,使用临床监测系统(Nihon Kohden,灰色)和神经堆栈(黑色)同时记录的示例数据显示信号相似。 f,数据(e)中功率谱图示例,显示一致的活动模式。使用对数刻度显示频率(0.1-32 Hz)。g,数据(e)中归一化功率谱密度(PSD)图示例。
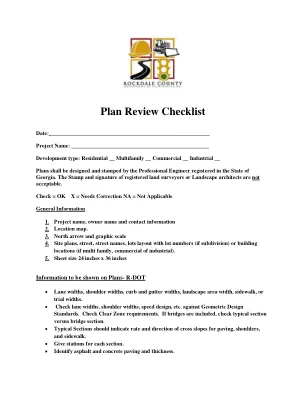
计划审查清单
添加 Superpave 混合设计等级。所有沥青路面均使用公制 Superpave 命名法,例如 9.5 mm Superpave、12.5 mm Superpave。ο • 典型路段应显示适用于每个路段的站点。站点不应重叠或跳过。应在适用时显示超高路段。每层路面都应标有深度和材料类型。• 在拓宽和重建项目中,典型路段应指示坡度或“匹配现有坡度”。• 检查前坡、沟渠深度、总体尺寸等。ο 如果有一条没有路缘的人行道,则人行道应距离道路至少 5 英尺。• 所有带有人行道的项目都应提供路缘切割坡道。索引应根据需要包括 GA 特殊细节 A1、A2、A3 和 A4。路缘切割坡道应按施工计划中的类型显示和标记。所有要求的位置都应显示可检测的警告。 • 路缘和排水沟部分应标明类型和尺寸。超高路段高侧的路缘和排水沟应与道路的方向和坡度相同。 • 检查所有注释和细节的准确性和必要性 • 人行道和景观美化的安装可以在地役权上进行。挖填斜坡、渠道和沟渠可以在地役权上建造。 • 残疾人停车位的位置应在计划中显示。放置残疾人停车位时,请记住通道需要可通往人行道,通常通过使用不能占用任何通道区域的路缘坡道。 • 人行横道 20 英尺范围内没有停车位。 • 闪光信号、停车标志、让行标志或交通控制信号 30 英尺范围内没有停车位。 • 检查是否需要增加减速车道或加速车道,要求 50' 锥度和 150' 行车道。 • 还要检查视距问题。 • 住宅检查是否需要任何类型的车道涵洞管道,通常最小 18 英寸。 • 车道入口的转弯半径因县而异,工业区为 35 英尺,商业区为 25 英尺,住宅区为 5 英尺 • 所有新入口都必须有 8 英寸厚的混凝土护堤,3500 PSI 覆盖在压实的路基上
NVIDIA H100 Tensor Core GPU 架构
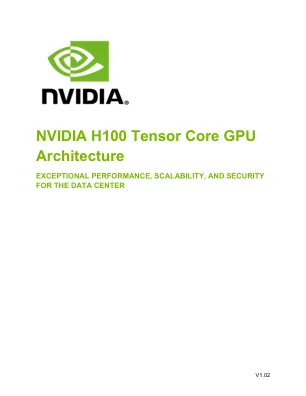
○ 与 A100 相比,新的第四代 Tensor Cores 的芯片间速度提高了 6 倍,包括每个 SM 的加速、额外的 SM 数量和 H100 的更高时钟频率。在每个 SM 的基础上,与上一代 16 位浮点选项相比,Tensor Cores 在等效数据类型上提供 2 倍的 A100 SM MMA(矩阵乘法累加)计算速率,使用新的 FP8 数据类型提供 4 倍的 A100 速率。Sparsity 功能利用深度学习网络中的细粒度结构化稀疏性,使标准 Tensor Core 操作的性能翻倍。○ 新的 DPX 指令使动态规划算法比 A100 GPU 加速高达 7 倍。两个示例包括用于基因组学处理的 Smith-Waterman 算法和用于在动态仓库环境中为机器人车队寻找最佳路线的 Floyd-Warshall 算法。○ 与 A100 相比,IEEE FP64 和 FP32 芯片间处理速度提高了 3 倍,这是由于每个 SM 的时钟对时钟性能提高了 2 倍,再加上 H100 的额外 SM 数量和更高的时钟。○ 新的线程块群集功能允许以大于单个 SM 上单个线程块的粒度对局部性进行编程控制。这通过在编程层次结构中添加另一个级别来扩展 CUDA 编程模型,现在包括线程、线程块、线程块群集和网格。集群支持跨多个 SM 同时运行的多个线程块同步并协作获取和交换数据。○ 新的异步执行功能包括一个新的张量内存加速器 (TMA) 单元,它可以在全局内存和共享内存之间非常高效地传输大块数据。TMA 还支持集群中线程块之间的异步复制。还有一个新的异步事务屏障,用于执行原子数据移动和同步。● 新的 Transformer Engine 结合使用软件和定制的 Hopper Tensor Core 技术,专门用于加速 Transformer 模型训练和推理。Transformer Engine 可智能管理并动态选择 FP8 和 16 位计算,自动处理每层 FP8 和 16 位之间的重新转换和缩放,与上一代 A100 相比,在大型语言模型上提供高达 9 倍的 AI 训练速度和高达 30 倍的 AI 推理速度。● HBM3 内存子系统提供的带宽比上一代增加了近 2 倍。H100 SXM5 GPU 是世界上第一款配备 HBM3 内存的 GPU,可提供一流的 3 TB/秒内存带宽。● 50 MB L2 缓存架构可缓存大量模型和数据集以供重复访问,从而减少 HBM3 的访问次数。● 第二代多实例 GPU (MIG) 技术为每个 GPU 实例提供大约 3 倍的计算能力和近 2 倍的内存带宽
NVIDIA H100 Tensor Core GPU 架构
○ 与 A100 相比,新的第四代 Tensor Cores 芯片间速度提高了 6 倍,包括每个 SM 的加速、额外的 SM 数量和 H100 的更高时钟频率。与上一代 16 位浮点选项相比,在每个 SM 上,Tensor Cores 在等效数据类型上提供 A100 SM 的 2 倍 MMA(矩阵乘法累加)计算速率,在使用新的 FP8 数据类型时提供 A100 的 4 倍速率。稀疏性功能利用深度学习网络中的细粒度结构化稀疏性,使标准 Tensor Core 操作的性能翻倍。○ 新的 DPX 指令使动态规划算法比 A100 GPU 快 7 倍。两个例子包括用于基因组学处理的 Smith-Waterman 算法和用于在动态仓库环境中为机器人车队寻找最佳路线的 Floyd-Warshall 算法。 ○ 与 A100 相比,由于每个 SM 的时钟性能提高了 2 倍,再加上 H100 的额外 SM 数量和更高的时钟频率,因此芯片到芯片的 IEEE FP64 和 FP32 处理速度提高了 3 倍。○ 新的线程块群集功能允许以大于单个 SM 上单个线程块的粒度对局部性进行编程控制。这通过在编程层次结构中添加另一个级别来扩展 CUDA 编程模型,现在包括线程、线程块、线程块群集和网格。群集支持跨多个 SM 同时运行的多个线程块以同步并协作获取和交换数据。○ 新的异步执行功能包括一个新的张量内存加速器 (TMA) 单元,它可以在全局内存和共享内存之间非常高效地传输大块数据。TMA 还支持群集中线程块之间的异步复制。还有一个新的异步事务屏障,用于执行原子数据移动和同步。 ● 新型 Transformer Engine 结合使用软件和定制的 Hopper Tensor Core 技术,专门用于加速 Transformer 模型的训练和推理。Transformer Engine 可以智能地管理和动态地选择 FP8 和 16 位计算,自动处理每层 FP8 和 16 位之间的重新转换和缩放,与上一代 A100 相比,在大型语言模型上提供高达 9 倍的 AI 训练速度和高达 30 倍的 AI 推理速度。● HBM3 内存子系统提供的带宽比上一代增加了近 2 倍。H100 SXM5 GPU 是世界上第一款配备 HBM3 内存的 GPU,可提供一流的 3 TB/秒内存带宽。● 50 MB L2 缓存架构可缓存大量模型和数据集以供重复访问,从而减少对 HBM3 的访问。● 第二代多实例 GPU (MIG) 技术为每个 GPU 实例提供大约 3 倍的计算能力和近 2 倍的内存带宽

A04 美国国家航空航天局轨道碎片计划办公室和MACS HTV-X3......
Jer-Chyi Liou (NASA) NASA 轨道碎片计划办公室 (ODPO) 是 NASA 总部安全与任务保障办公室 (OSMA) 的一个授权计划。NASA 轨道碎片缓解程序要求 NPR 8715.6E 规定了 ODPO 的角色和职责,包括 (1) 现场以及通过雷达、望远镜和实验室实验收集轨道碎片测量数据,(2) 开发轨道碎片模型和任务支持工具,(3) 评估和记录 NASA 任务是否符合轨道碎片缓解要求,以及 (4) 为美国和国际社会的轨道碎片缓解政策和最佳实践做出贡献。ODPO 的首要任务是表征低地球轨道 (LEO) 中毫米级小型轨道碎片的风险。毫米级轨道碎片对于在 600 至 1000 公里高度运行的航天器而言,是终止任务的最高风险,数百架航天器在此高度运行,但缺乏对环境中如此小碎片的直接测量数据。需要毫米级轨道碎片的直接测量数据来支持制定和实施具有成本效益的防护措施,以确保未来太空任务的安全运行。2018 年美国国家空间交通管理政策、2021 年美国国家轨道碎片研究与发展计划和 2022 年美国国家轨道碎片实施计划也认识到需要解决低地球轨道这一关键数据缺口。自 2020 年代初以来,ODPO 一直在探索各种用于现场测量小型轨道碎片的粒子探测技术。这些努力的成果是与 JAXA 合作研发的多层声学和导电网格传感器 (MACS)。 MACS 结合了几种简单的检测原理,以最大限度地利用从每次碎片检测中提取的信息,从而为对低地球轨道上小型轨道碎片群体的定义进行有意义的改进提供数据。MACS 是一个四层传感系统。第一层是 JAXA 的导电网格薄膜空间碎片监测器 (SDM),第二层和第三层是相同的 Kapton 薄膜,最后一层是低密度合成泡沫板。每层都连接了多个声学传感器,以测量撞击时间和位置。泡沫板上的声学传感器也用于测量撞击动能。所有四层数据的组合提供了有关每个撞击轨道碎片颗粒的大小、质量、密度、撞击时间、速度和方向的信息。自 2017 年以来,ODPO 已与 JAXA 建立了多项代理协议,以开发、测试和优化 MACS 的设计。2022 年确定了在未来的 HTV-X 飞行中对 MACS 进行技术演示的机会,并于 2023 年确认。MACS HTV-X3 技术演示任务由 OSMA、NASA 科学任务理事会赞助,以及国际空间站 (ISS) 计划。HTV-X3 离开国际空间站后的技术演示阶段的任务概况尚未最终确定,但 HTV-X3 可能达到 500 公里的最大高度,持续时间长达 18 个月。HTV-X3 演示为充分完善 MACS 技术准备水平并展示其小碎片探测能力提供了绝佳机会,这将为 ODPO 在不久的将来开展一项任务以解决 600 公里高度以上关键的毫米级轨道碎片数据缺口铺平道路。
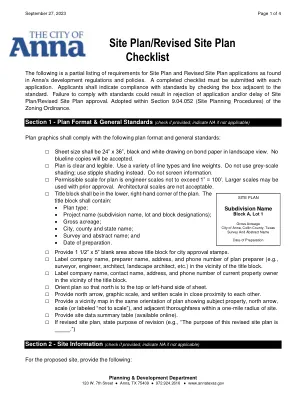
场地规划/修订场地规划清单
□ 规划与场地批准的有效规划和地籍图相一致。 □ 规划与相邻场地批准的有效规划和地籍图相结合。 □ 规划与场地批准的分区和/或特定使用许可相一致。 □ 显示当前和拟议的物业边界/地界。根据需要标注距离和方位或曲线数据。 □ 地块符合最小地块正面、地块宽度、地块深度和地块面积标准。 □ 标注拟议的地块和街区名称。 □ 标注每个地块的面积(以英亩和平方英尺为单位)。 □ 测量物业边界到最近的相交街道或车道的尺寸。 □ 显示并标注以海平面基准为参考的一英尺等高线处的现有地形。 □ 显示并标注以海平面基准为参考的一英尺等高线处的拟议地形。可以使用点高程,但不能代替等高线。 □ 显示并标注洪泛区、排水道和小溪。 □ 显示并标注前院、侧院和后院建筑物退缩距离。 □ 显示并标注现有和拟建建筑。提供建筑物的一般尺寸和建筑物之间的距离。□ 对于每栋建筑,标注拟建用途、建筑总面积(平方英尺)、建筑高度(层数)和建筑高度(以英尺为单位,以建筑最高部分为单位)。□ 如果拟建地块毗邻或包含 100 年开发条件洪泛区,则标注每栋建筑的最低完工楼层标高。□ 显示并标注车辆流通车道、私人车道、消防车道和车道。标注现有或拟建。用 10% 的点画图案遮蔽消防车道;不要使用灰度阴影。标注路面宽度、ROW 和/或地役权宽度、车道喉宽、半径以及车道与交叉街道之间的距离。标注路面结构(例如沥青、混凝土等)。□ 显示至少两个车辆出入口。□ 显示、标注和标注可见性出入口维护 (VAM) 地役权和角夹。 □ 地段之间设有地役权内的交叉通道。 □ 显示、标记和标注直通车道,包括所有停靠点(菜单板、窗户等)和堆放处。 □ 车辆通道、私人车道、消防车道和私家车道与场地的交通影响分析一致。 □ 显示停车区。标记为现有或拟议。标记路面结构(例如沥青、混凝土等)。标注停车位尺寸并标注每层停车位的停车位数量。显示和标记无障碍停车位,包括无障碍乘客装卸区和路线。显示、标记和标注所需的路外装卸空间 □ 死胡同停车位的深度不应超过六个停车位。 □ 超过 150 英尺的死胡同消防车道需要有经批准的掉头处。 □ 显示和标记场外停车位。标注从场外停车场到最近的设施的距离,场外停车场将提供支持。 □ 显示和标记景观区域。不要使用树木标记。□ 显示、标记和尺寸(宽度)所需的景观缓冲区。不要使用树木标记。□ 显示现有和拟议的水利设施和相关地役权。尺寸地役权宽度。标记线尺寸。显示和标记水表并提供识别符号。显示和标记阀门、消防部门连接、消防栓、探测器检查室和其他相关结构。□ 提供水表时间表。时间表应包含仪表符号标识、仪表类型(家用或灌溉)、仪表尺寸、仪表数量,并注明现有或拟议的仪表