XiaoMi-AI文件搜索系统
World File Search System比例因子

包括热耦合的 GRACE 后续激光测距干涉仪比例因子测定
摘要:GRACE 后续卫星携带了第一台星际激光测距干涉仪 (LRI)。在轨运行四年多后,LRI 的灵敏度超过了传统的微波仪器 (MWI)。然而,在当前的数据处理方案中,LRI 产品仍然需要 MWI 数据来确定未知的绝对激光频率,代表将原始相位测量转换为米级物理位移的“标尺”。在本文中,我们推导出精确执行从相位测量到距离的转换的公式,考虑到变化的载波频率。此外,还推导出了由于载波频率的知识不确定性以及未校正的时间偏差而导致的主要误差。在第二部分中,我们讨论了当前采用的交叉校准方案中 LRI 对 MWI 的依赖性,并提出了三种不同的 LRI 激光频率模型,其中两种模型在很大程度上独立于 MWI。此外,我们分析了热变化对尺度因子估计和 LRI-MWI 残差的贡献。推导出一种称为热耦合 (TC) 的线性模型,该模型显著降低了 LRI 和 MWI 之间的差异,使 MWI 观测限制了比较的水平。

DSP-3100 FOG | 运河测绘
整个 DSP-3000 系列均采用 KVH 的专利数字信号处理 (DSP) 电子设备。KVH 的突破性 DSP 设计克服了模拟信号处理的局限性,几乎消除了温度敏感漂移和旋转误差。此外,KVH 的 DSP 技术在比例因子和偏置稳定性、比例因子线性度、开启到开启重复性和最大输入速率等关键领域提供了显著的性能改进。超低噪音 (ARW)、对交叉轴误差的不敏感性以及冲击和振动稳健性使 DSP-3000 系列成为要求苛刻的工业应用的理想选择。这种性能与我们成熟的全光纤光学电路固有的简单性和可靠性相结合,使 DSP-3000 系列成为运动感应、稳定、导航和精确指向应用的经济实惠的出色解决方案。

根据硅死亡的表面条件的断球测试...
抽象研究了厚度和表面研磨条件对厚度低于100 µm的Si晶片的断裂强度的影响。通过球断裂强度测量每个晶片的大约330个模具(尺寸:4 mm×4 mm)。为了对骨折强度的统计分析,从Weibull图中确定了比例因子。断裂器断裂强度随着sil-icon死亡厚度的降低而增加。对于不同表面条件的硅死亡,断裂,地面(#4800)和地面(#320砂砾)标本的硅断裂强度很高。概率断裂强度(即比例因子)随着硅死亡的表面粗糙度的降低而增加。(2013年5月27日收到; 2013年6月7日修订; 2013年6月17日接受)

DSP-3000 FOG | 运河测绘
DSP-3000 采用 KVH 专利的数字信号处理 (DSP) 电子设备。KVH 突破性的 DSP 设计克服了模拟信号处理的局限性,几乎消除了温度敏感的漂移和旋转误差。此外,KVH 的 DSP 技术在比例因子和偏置稳定性、比例因子线性度、开启到开启重复性和最大输入速率等关键领域提供了显著的性能改进。超低噪音 (ARW)、对横轴误差的不敏感性以及冲击和振动稳健性使 DSP-3000 成为要求苛刻的工业应用的理想选择。这种性能与我们成熟的全光纤光学电路固有的简单性和可靠性相结合,使 DSP-3000 成为运动感应、稳定、导航和精确指向应用的出色且经济实惠的解决方案。
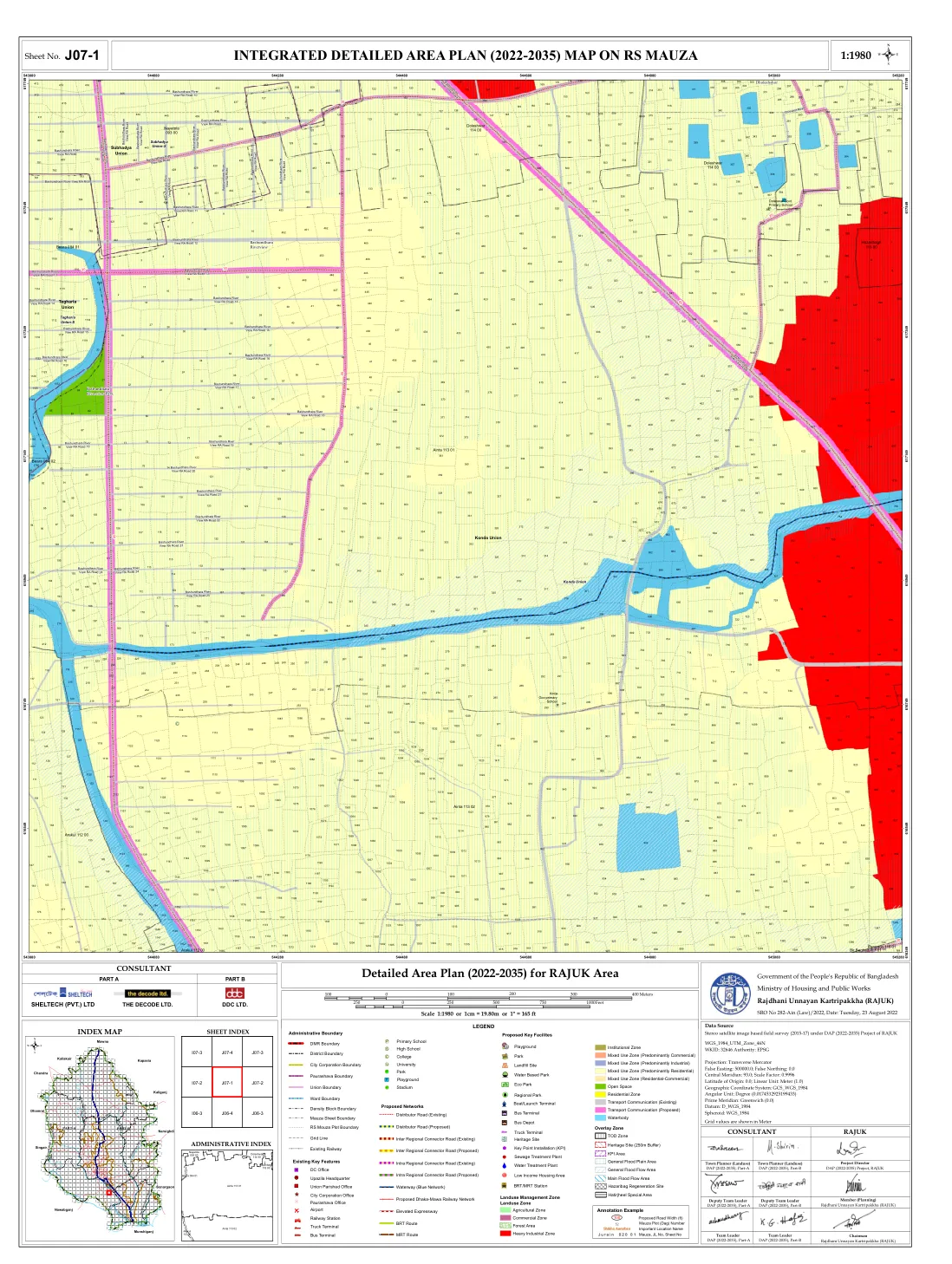
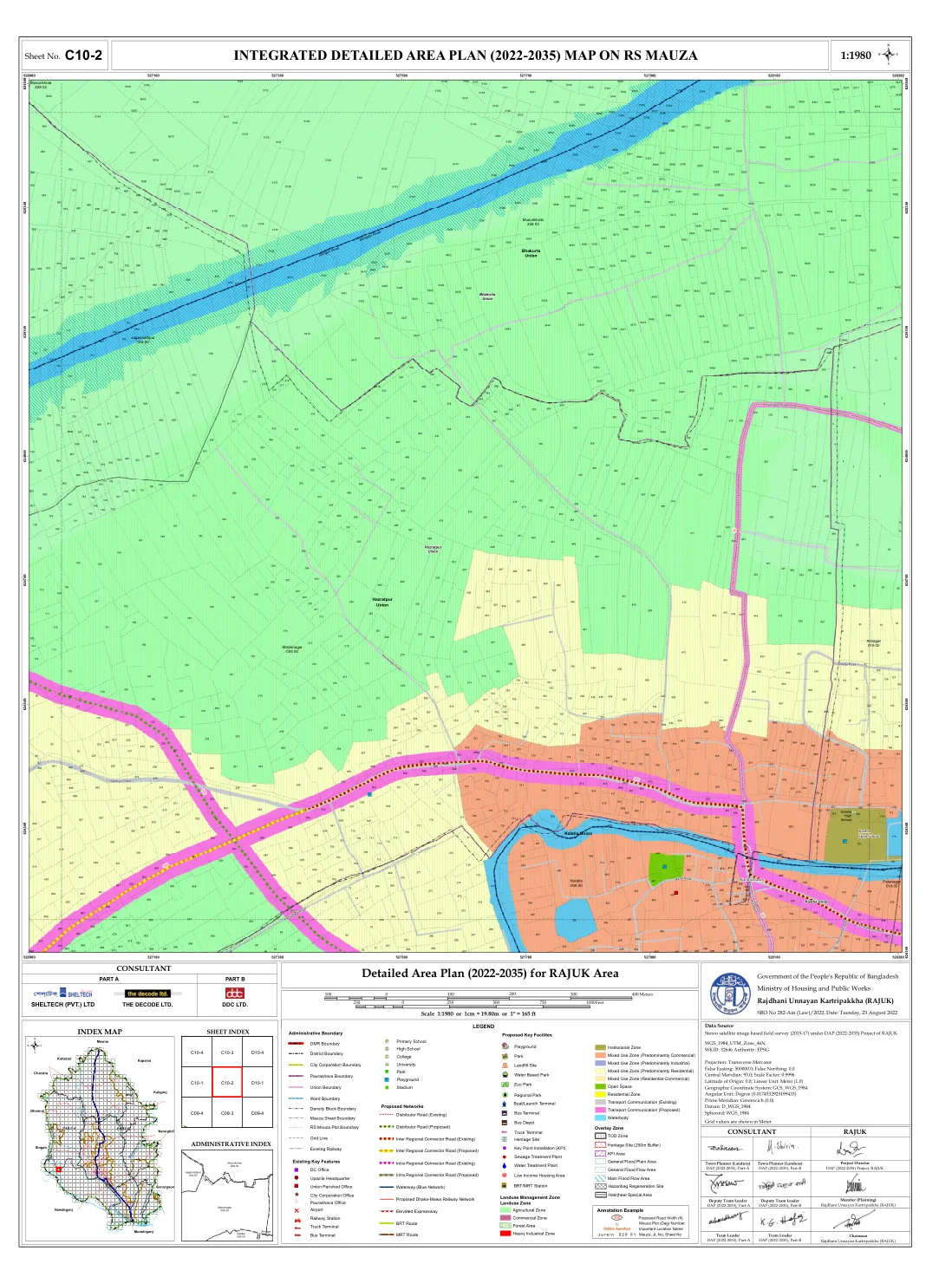
综合详细区域规划(2022-2035) RS MAUZA 表号上的地图。
投影:横轴墨卡托投影 东偏移:500000.0;北偏移:0.0 中央子午线:93.0;比例因子:0.9996 原点纬度:0.0;线性单位:米 (1.0) 地理坐标系:GCS_WGS_1984 角度单位:度 (0.0174532925199433) 本初子午线:格林威治 (0.0) 基准:D_WGS_1984 椭球体:WGS_1984
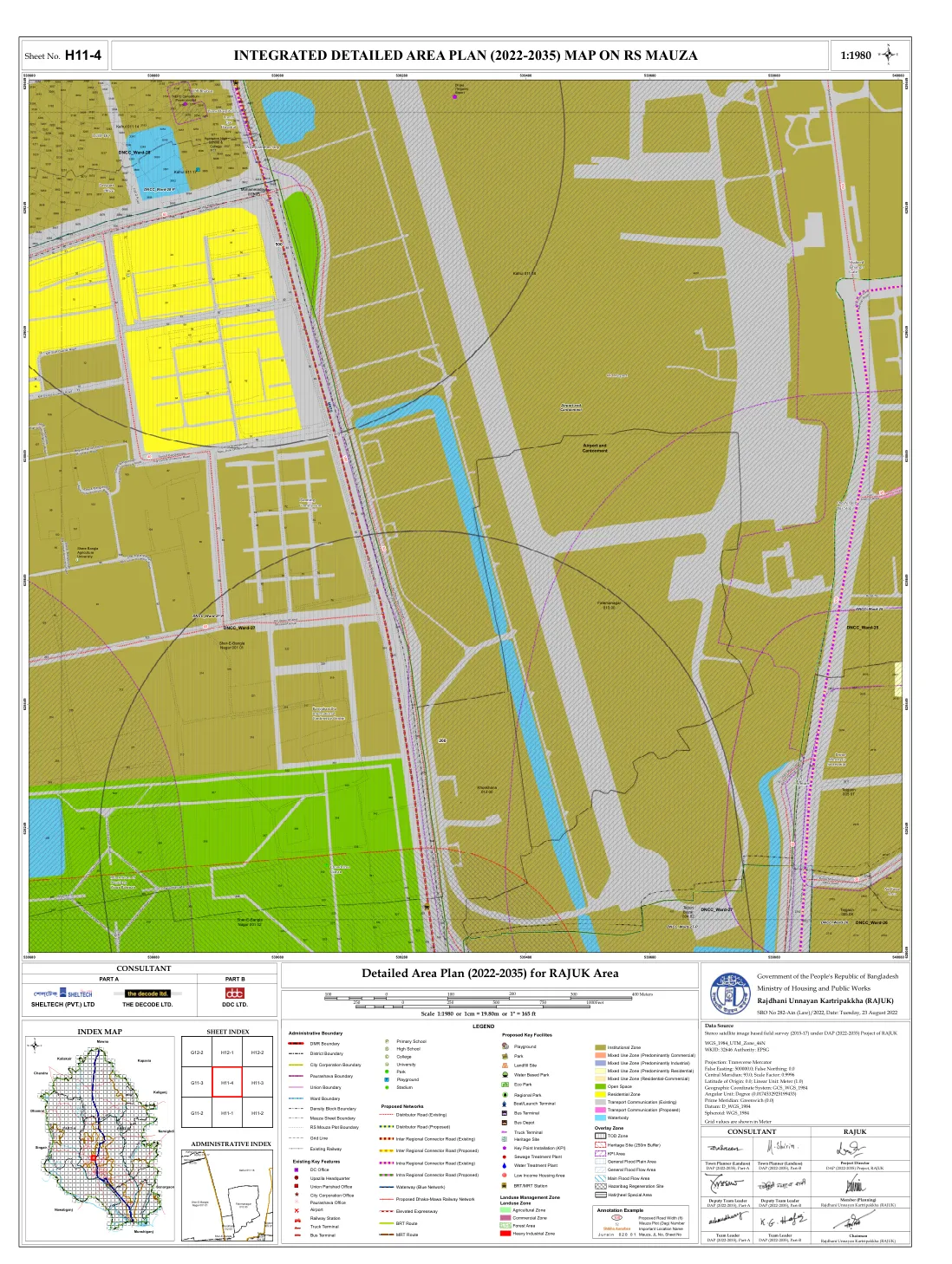
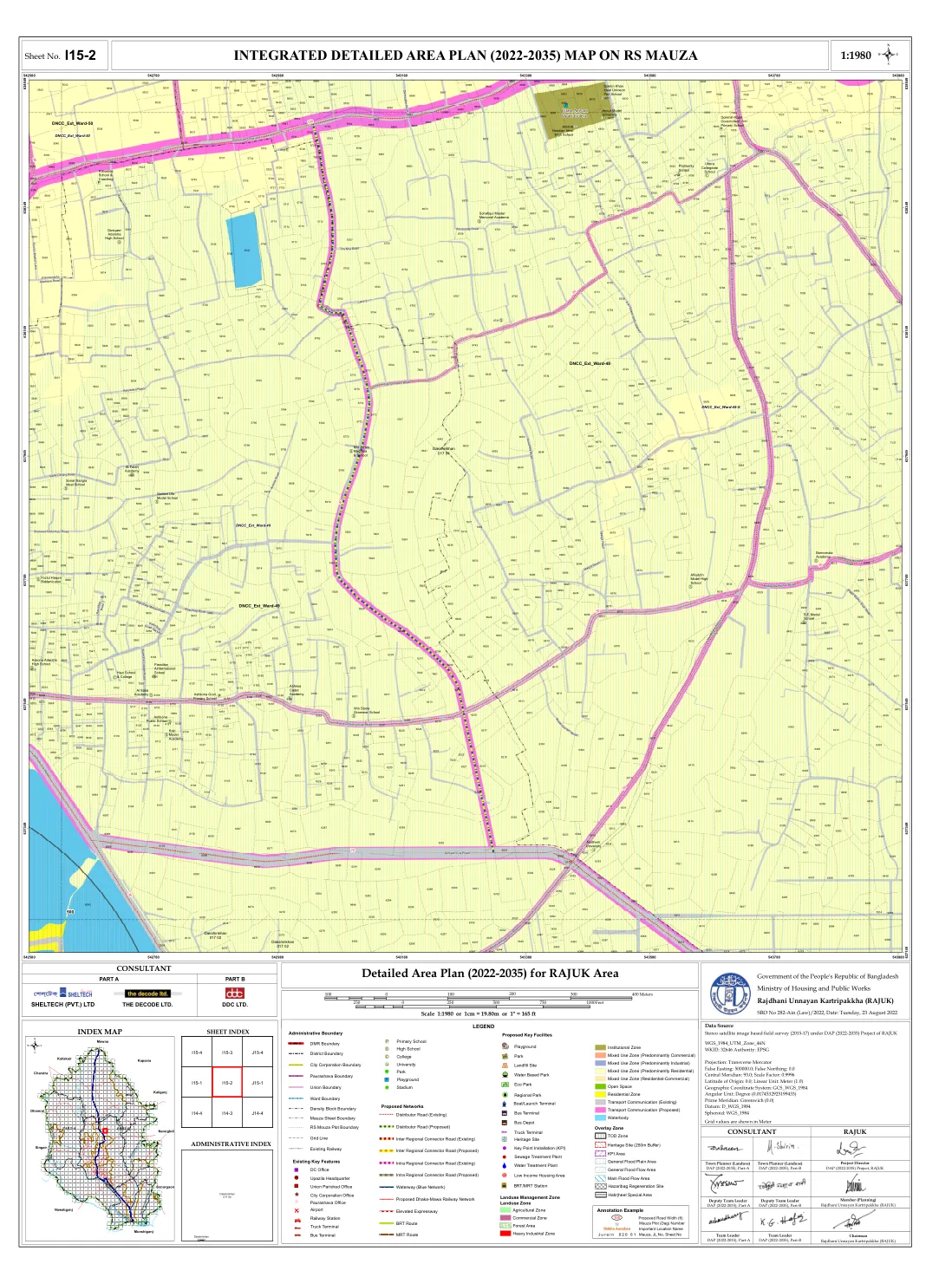
综合详细区域规划(2022-2035) RS MAUZA 表号上的地图。
投影:横轴墨卡托投影 东偏移:500000.0;北偏移:0.0 中央子午线:93.0;比例因子:0.9996 原点纬度:0.0;线性单位:米 (1.0) 地理坐标系:GCS_WGS_1984 角度单位:度 (0.0174532925199433) 本初子午线:格林威治 (0.0) 基准:D_WGS_1984 椭球体:WGS_1984
综合详细区域规划(2022-2035) RS MAUZA 表号上的地图。
投影:横轴墨卡托投影 东偏移:500000.0;北偏移:0.0 中央子午线:93.0;比例因子:0.9996 原点纬度:0.0;线性单位:米 (1.0) 地理坐标系:GCS_WGS_1984 角度单位:度 (0.0174532925199433) 本初子午线:格林威治 (0.0) 基准:D_WGS_1984 椭球体:WGS_1984
综合详细区域规划(2022-2035) RS MAUZA 表号上的地图。
投影:横轴墨卡托投影 东偏移:500000.0;北偏移:0.0 中央子午线:93.0;比例因子:0.9996 原点纬度:0.0;线性单位:米 (1.0) 地理坐标系:GCS_WGS_1984 角度单位:度 (0.0174532925199433) 本初子午线:格林威治 (0.0) 基准:D_WGS_1984 椭球体:WGS_1984