XiaoMi-AI文件搜索系统
World File Search System水滴

测量湿度(及其重要性) - AEMC 仪器
测量湿度(以及它的重要性)大多数人都非常清楚湿度对人类舒适度和健康的影响,尤其是当湿度与高温相结合时。湿度如何影响电气系统可能不太为人所知。例如,高湿度会导致液态水滴在电路上凝结,从而产生短路和腐蚀等问题。许多地理区域容易出现潮湿环境,尤其是热带地区。但即使在相对温和的气候下,也可能出现高湿度,具体取决于海拔、与水体的距离以及季节影响。此外,电气柜内部和周围的“微气候”可能导致与冷凝相关的问题。因此,国际电气测试协会 (NETA) 等标准机构通常要求在测试报告中包括湿度数据。绝对湿度与相对湿度 简单地说,湿度就是空气中的水蒸气量。通常用以下两种方法之一来测量: • 绝对湿度 (AH) 是给定体积的空气中存在的水蒸气质量。这通常以每立方米克 (g/m³) 表示,并随着空气体积的变化而变化。• 相对湿度 (RH) 是水蒸气密度 (单位体积质量) 与饱和蒸气压 (空气无法容纳更多水蒸气且液滴开始沉淀的点;这也称为露点) 下水蒸气密度之比。这通常以百分比表示,并随气压和温度而变化。在本应用说明中,湿度将表示为 RH。湿度与人 保持适当的湿度水平对于确保舒适健康的室内环境非常重要。湿度过高会使工作变得困难,尤其是在涉及体力活动的情况下。不那么直接(但同样重要)的是,高湿度会促进霉菌的生长,从而导致呼吸问题。它还会导致油漆剥落、铁质物体生锈以及因冷凝而光滑的表面。这些因素和其他因素会严重影响您的健康和安全。通常,湿度水平在 30% 到 40% 之间被认为是获得最大舒适度的理想水平。为了确保湿度保持在此范围内,设施采用各种 HVAC 系统,包括空调、受控机械通风和除湿机。为了测试其效率,定期用湿度计和其他湿度测量仪器检查湿度水平非常重要。在许多情况下,在较长时间内连续监测湿度也很有用,可以识别潜在的趋势和峰值。

2020 年 1 月 7 日星期二 太空中的印度食物:DRDO 为 Gaganyaan 宇航员准备的菜单 Gaganyaan 宇航员将享用为太空旅行重新制作的印度食物
2020 年 1 月 7 日,星期二,太空中的印度食物:DRDO 为 Gaganyaan 宇航员准备的菜单 Gaganyaan 宇航员将享用适合太空条件的印度食物。作者:Rekha Dixit 早餐是 Idli 或 upma。午餐可以选择鸡肉比尔亚尼饭或素食印度饭,配以木豆和什锦蔬菜。晚餐来份鸡肉咖喱和印度薄饼怎么样?Sooji halwa 是不错的甜点,当您感到饥饿时,可以吃一根能量棒。抱歉,这是一次无烟无酒精的航班,但您可以自备咖啡或茶,或者选择果汁。所有这些,甚至更多,都可以通过 ISRO 的 Gaganyaan 计划在太空中获得。Gaganyaan 是印度的首次载人航天飞行。该航天飞机计划于 2022 年前起飞,将为先驱宇航员提供由国防研究发展组织 (DRDO) 提供的印度美食,该组织负责为为期一周的飞行准备食物。在 DRDO 忙于设计菜单的同时,其位于迈索尔的国防食品研究实验室 (DFRL) 正在改进一系列包装食品,为执行严酷任务的士兵制作。一份包含印度各地美食的二十多种食品清单正在制定中。 “我们希望在三次飞行中的第一次飞行中准备好一组初始食品,”DFRL 主任 D. Semwal 说道。Gaganyaan 任务包括三次飞行;前两次将是无人驾驶的,只有第三次将有两名或三名宇航员组成的人类机组人员。印度空军的四名试飞员已从最初的十名候选名单中选出,接受飞行的进一步培训。虽然有各种各样的太空食品可供选择,因为人类已经航行了六十多年,许多人已经在国际空间站等空间站上呆了几个月,但 Gaganyaan 是一个平台,可以将印度美食以印度的方式改编为太空飞行。“我们的食物保持温和的调味,不过对于那些想要的人来说,我们会提供额外的香料包,”Semwal 在班加罗尔第 107 届印度科学大会的印度骄傲展览上说道。食品包将是干燥的,需要通过加水来重新溶解。在太空舱的零重力环境中,必须在密闭空间内添加水,这样水滴才不会漂浮在飞船各处。入围的食品都经过了精心挑选。例如,面包就不在名单上,因为它容易碎,而面包屑可能会让人烦恼。

合成神经中的平行传输
2英国牛津大学牛津大学牛津大学综合生物学培训中心3英国牛津大学生物化学系4对这项工作 *相当贡献 *通讯作者摘要的生物电子设备,这些设备是无绳和软的,在医学,机器人和化学计算中的开发项目的前线。在这里,我们描述的是生物启动的合成神经元,完全由柔软的柔性生物材料组成,能够在厘米距离内快速电化学信号传递。像天然细胞一样,我们的合成神经元从其末端释放神经递质,从而启动下游反应。神经元的成分是通过脂质双层连接的纳米液水滴和水凝胶纤维。传输是通过轻驱动泵向上游双层驱动的,并通过离子传导蛋白孔介导。通过将多个神经元捆绑成合成神经,我们表明不同的信号可以同时沿平行轴突传播,从而传递时空信息。合成神经可能在下一代植入物,软机器和计算设备中起作用。引言生物电子学的新兴领域主要集中于可植入和可穿戴的医疗设备的开发,这些设备可调节目标组织的生物电活性以产生治疗作用1-5。类似的技术正在加速机器人技术6,7和计算设备8-12的进度。然而,由于其僵硬的电极阻碍,传统设备尚未发挥其全部潜力。机械性能不是生物电子学所面临的唯一问题。这种电极通常会随着时间的流逝而降解,从而导致与活细胞的通信失去。此外,刚性电极材料,例如金属,产生较差的设备 - 组织界面,导致细胞的不加区分靶向,组织损伤3。解决这些局限性的努力涉及用软或生物组件13,14封装电极,或者专注于电极微型化和提高的柔韧性4,13。然而,这种修改无法改变这些材料的固有机械性能,这意味着它们仍然太僵硬,无法满足生物组织的机械要求3。常规电极仅限于使用电脉冲(场和电流)作为活细胞检测的信号2,4。但是,在细胞通信中,信号在很大程度上基于离子和分子的释放15,16。通过用软电极材料(例如导电17-20)替换设备中的传统电极来取得进展。随着生物相容性和柔韧性的改善,由这些材料构建的设备涉及许多常规技术的固有局限性。例如,软电极材料已被用于介导离子信号传导,从而提供了与组织20-22的增强界面,但到目前为止的方法已经是
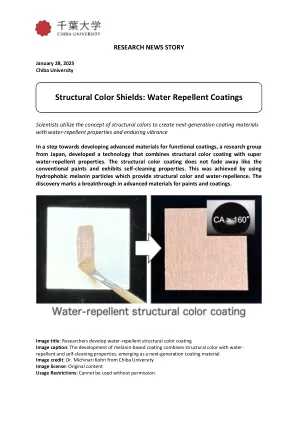
结构色彩防护:防水涂层
你有没有想过孔雀羽毛的鲜艳蓝色或甲虫身上闪闪发光的金属几丁质?这些自然奇观就是结构色的例子——微观结构产生鲜艳持久色调的现象。受到这些奇迹的启发,日本的一个研究小组一直在探索结构色。他们早期的工作发现,用黑色素颗粒制备结构色材料模仿了孔雀羽毛的着色机制。在此基础上,该团队着手开发一种涂层材料,利用黑色素颗粒捕捉结构色的光彩,即使从不同角度观看也能产生非彩虹色。研究小组包括日本千叶大学理工学院的 Michinari Kohri 教授和 Yui Maejima 女士,他们与武田胶体技术咨询有限公司的 Shin-ichi Takeda 博士和国家材料科学研究所的 Hiroshi Fudouzi 博士合作。他们的研究成果于 2024 年 12 月 18 日发表在《大分子反应工程》上。Kohri 博士描述了他进行这项研究的动机,“多年来,我们一直在研究受自然生物启发的基于黑色素的结构色材料。我们的动机是通过开发快速创造结构色并添加防水等功能特性的方法,使这些材料更加实用。” 为了实现这一目标,该团队准备了三种不同直径的聚苯乙烯颗粒。然后,他们添加了一层聚多巴胺(改性黑色素颗粒),然后通过迈克尔加成反应添加具有疏水性的具有 18 个碳原子的烷基(十八烷基)。在该反应中,带负电荷的化学基团添加到 α,β-不饱和羰基化合物中,以引入增强防水性的疏水基团。这是在不依赖疏水性但会引起重大环境问题的氟化合物的情况下实现的。使用时域核磁共振 (TD-NMR) 方法确认了颗粒的疏水性。处理完颗粒后,它们会分散在己烷中,从而可以快速高效地应用于玻璃和三聚氰胺层压板等基材上。干燥后,涂层的接触角超过 160 度,色调单一,表面自洁,呈现出荷叶效应,水滴在材料上形成水珠并滚落,不会留下残留物。研究发现,用十八烷基涂层获得的疏水性黑色素颗粒的疏水性几乎与用氟化合物涂层的颗粒相同,而氟化合物具有高疏水性。第一作者 Maejima 女士强调了这项研究的独特发现,她指出,“我们发现,通过将粒子表面的疏水性与粒子的分级组装结构相结合,可以实现超疏水结构彩色涂层,而这一切只需几分钟即可完成。”该团队专注于创建一种简单且可扩展的方法,确保涂层可以在几分钟内完成,而无需复杂的设备或工艺。前岛女士评论了他们发现的实用性:“这项技术有可能成为下一代涂层材料,非常适合墙纸或户外表面等应用,而无需依赖会随着时间而褪色的颜料。它的简单性和效率使其非常适合工业用途。”
离子表面活性剂介导的数字微流体电去湿
使用电信号 1 来操纵基板上的液滴的能力(称为数字微流体)用于光学 2,3 、生物医学 4,5 、热 6 和电子 7 应用,并已导致商业上可用的液体透镜 8 和诊断套件 9,10 。这种电驱动主要通过电润湿实现,液滴在施加电压的作用下被吸引到导电基板上并在导电基板上扩散。为确保强大而实用的驱动,基板上覆盖有介电层和疏水性面漆,用于介电上电润湿 (EWOD) 11-13 ;这会增加驱动电压(至约 100 伏),并可能因介电击穿 14 、带电 15 和生物污垢 16 而损害可靠性。在这里,我们展示了液滴操控,它使用电信号诱导液体脱湿而不是润湿亲水性导电基底,而无需添加层。在这种与电润湿现象相反的电润湿机制中,液体-基底相互作用不是由电场直接控制的,而是由场诱导的离子表面活性剂与基底的附着和分离控制的。我们表明,这种驱动机制可以在空气中使用掺杂硅晶片上的水执行数字微流体的所有基本流体操作,仅需±2.5伏的驱动电压、几微安的电流和离子表面活性剂临界胶束浓度的约0.015倍。该系统还可以处理常见的缓冲液和有机溶剂,有望成为一种简单可靠的微流体平台,适用于广泛的应用。由于疏水表面是液体吸引机制良好运作的必要条件,我们认识到亲水表面对于液体排斥机制来说是首选。由于大多数材料都是亲水性的,如果发现脱湿驱动有效,则可以像 EWOD 一样实现数字微流体,但不需要疏水涂层。虽然大多数电诱导脱湿现象对常见微流体无效,因为它们基于不可逆过程 17,18 或特殊条件 19 ,但涉及表面活性剂的研究表明可逆性是可能的。例如,已经使用氧化还原活性表面活性剂 20 证明了衍生化金电极上水膜的电引发脱湿。此外,有机液滴已在水性电解质 23 中的共轭聚合物电极上移动。最近,通过使用离子表面活性剂,润滑摩擦系数已在固体-液体-固体配置中切换 21 ,沸腾气泡成核已在液体-蒸汽-固体系统中得到调节 22 。然而,这些方法并没有导致微流体平台技术,这需要可逆、可重复、强大且易于应用于液体-流体-固体系统的电驱动 24 。事实上,我们无法在裸露的金属电极 21,22 或介电涂层电极上用含有离子表面活性剂的水滴获得有效驱动。相反,我们发现裸露的硅晶片可以有效地工作,因为它的天然氧化物具有足够的亲水性,可以轻松脱湿,但又足够薄

具有纳秒间隔的可调谐 X 射线自由电子激光多脉冲
X 射线自由电子激光器 (XFEL) 的光子束比第三代光源亮 10 个数量级,是科学应用中最亮的 X 射线源 1 – 4 。其独特的波长可调性、飞秒脉冲持续时间和出色的横向相干性被用于多个科学研究领域,包括原子、分子和光学物理、化学、生物、凝聚态物理和极端条件下的物质 5 。X 射线脉冲定制一直是一个非常活跃的研究领域,包括新型超短高功率模式 6、7,极化控制 8 – 10 和双色双脉冲 11 – 18 。双 X 射线脉冲被开发用于进行 X 射线泵/X 射线探测实验,其中由一个 X 射线脉冲引发的超快物理和化学动力学可以通过第二个超短 X 射线探测脉冲来探索。这种脉冲通常是用分裂波荡器11、16或双束流技术15产生的。在双束流模式下,脉冲之间的时间间隔限制在125 fs以内,而使用新鲜切片方案16通常会产生最大延迟约为1皮秒的双脉冲。然而,有些实验需要更长的时间间隔。例如,可以通过用第一个X射线脉冲触发取决于压力的过程,然后在几纳秒后用第二个X射线脉冲探测它们,来研究水滴的爆炸19。可以用延迟超过120纳秒的第二个脉冲来探测X射线在气体装置中引起的丝状效应20。在X射线探针/X射线探针类实验中,两个脉冲都不是用来驱动样品进入不同状态的,但两个X射线脉冲在散射后可以进行有效比较,并用于在明确定义的时间间隔内提取信息。例如,从记录的散斑图案研究了磁性 skyrmion 的平衡波动,这些散斑图案是纳秒范围内两个衰减 x 射线脉冲之间的时间延迟的函数 21 – 25。最近,随着 LCLS 基于 x 射线腔的系统的出现,双脉冲和多脉冲模式传输变得至关重要 26、27。基于腔的 XFEL(CBXFEL)项目目前依赖于 220 ns 双脉冲模式,而 x 射线激光振荡器 (XLO) 28 将使用最多 8 个脉冲串,间隔为 35 ns。许多极端条件下的物质 (MEC) 实验也需要最多 8 个 x 射线脉冲,间隔 ≤ 1 ns,现在可以传输 29 – 31。在本文中,我们完整描述了一种新型双桶方案,该方案在 LCLS-I 和 LCLS-II 波荡器上使用铜直线加速器 32 – 34 运行。我们使用在不同射频 (RF) 桶中加速的两个电子束将 x 射线脉冲延迟范围扩展到 1 ps 以上。使用现有的 S 波段加速结构,工作频率为 2.856 GHz,可用的最小时间延迟为 ∼ 350 ps,对应于单个桶分离。延迟可以按整数桶数进行控制,也可以按 350 ps 的步长控制,最高可达数百纳秒。基于超导加速器技术的现有和计划中的高重复率 FEL 机器将产生重复率为 MHz 量级的光子束串,因此 XFEL 脉冲之间的最小距离比使用所提出的方案可实现的距离长得多。FERMI 展示了一种类似的技术,可以产生最大分离为 ∼ 2.5 ns 的双电子束。然而,激光过程仅限于极紫外波长。
Hazus 飓风模型技术手册
图 2-1 哈祖斯飓风模型方法示意图..................................................................................................................... 2-3 图 2-2 哈祖斯飓风分析层次..................................................................................................................................... 2-6 图 4-1 平均风廓线......................................................................................................................................................... 4-4 图 4-2 所有 MBL 情况下 RMW 附近的水滴的平均和拟合对数廓线............................................................. 4-6 图 4-3 RMW 附近 10 米处海面阻力系数随平均风速的变化............................................................. 4-7 图 4-4 RMW 外情况的平均风廓线和拟合对数廓线............................................................................................. 4-8 图 4-5 RMW 外情况 10 米处海面阻力系数随平均风速的变化......................................................................... 4-9 图 4-6 10 – 30公里和 30 – 60 公里 RMW 情况..................................................................................................................................................... 4-10 图 4-7 回归模型、Kepert(2001)模型与观测到的边界层高度的比较......................................................................................................................... 4-13 图 4-8 10 至 30 公里和 30 至 60 公里 RMW 情况下 RMW 附近观测到的和建模的速度剖面......................................................................................................... 4-14 图 4-9 在 RMW 附近采集的投掷探空仪数据的建模风速与高度的平均误差......................................................................................... 4-14 图 4-10 RMW 附近 10 米处平均风速与边界层顶部平均风速的建模与观测比值比较......................................................................................................................... 4-16 图 4-11 投掷探空仪数据的建模风速与高度的平均误差在 RMW 区域外拍摄的照片 ............................................................................................................................................. 4-16 图 4-12 完全过渡的陆地平均风速(z 0 =0.03 米)与水面平均风速(z 0 =0.0013 米)与边界层高度的比值 ............................................................................. 4-18 图 4-13 ESDU 和修改后的 ESDU 风速过渡函数 ............................................................................................. 4-18 图 4-14 使用平板模型计算的朝向页面顶部移动的飓风的喷射强度 ............................................................................................................................................. 4-20 图 4-15 显示模拟和观测到的风速、表面气压和风向的示例图......................................................................................................................................... 4-22 图 4-16 显示模拟和观测到的风速、表面气压和风向的示例图(续)......................................................................................................................................... 4-23 图 4-17 显示模拟和观测到的风速、表面气压和风向的示例图(续)......................................................................................................................................... 4-24 图 4-18 显示模拟和观测到的风速、表面气压和风向的示例图(续)......................................................................................................................................... 4-25 图 4-19 显示模拟和观测到的风速、表面气压和风向的示例图(结束)......................................................................................................................... 4-26 图 4-20 比较图 4-21 美国登陆飓风在开阔地形中模拟和预测的最大地面峰值阵风风速示例比较 ............................................................................................................. 4-29 图 4-22 已消除的剖面示例 ......................................................................................................................................... 4-36 图 4-23 穿越给定飓风的表面气压剖面示例 ......................................................................................................... 4-374-25 图 4-19 显示模拟和观测到的风速、表面气压和风向的示例图(完结)......................................................................................................................................... 4-26 图 4-20 15 个登陆飓风的模拟和观测到的最大峰值阵风风速比较......................................................................................................... 4-28 图 4-21 美国登陆飓风在开阔地形中模拟和预测的最大表面峰值阵风风速的示例比较............................................................................. 4-29 图 4-22 已消除剖面的示例......................................................................................................................... 4-36 图 4-23 穿越给定飓风的表面气压剖面示例......................................................................................................... 4-374-25 图 4-19 显示模拟和观测到的风速、表面气压和风向的示例图(完结)......................................................................................................................................... 4-26 图 4-20 15 个登陆飓风的模拟和观测到的最大峰值阵风风速比较......................................................................................................... 4-28 图 4-21 美国登陆飓风在开阔地形中模拟和预测的最大表面峰值阵风风速的示例比较............................................................................. 4-29 图 4-22 已消除剖面的示例......................................................................................................................... 4-36 图 4-23 穿越给定飓风的表面气压剖面示例......................................................................................................... 4-37