XiaoMi-AI文件搜索系统
World File Search System油门
人为因素分析和分类系统 (HFACS)
仅在 64 节以下减速油门不会产生任何效果。当自动系统切换到“油门保持”模式时,自动油门才会以这种方式在 64 节以上断开。低于此速度时必须手动断开自动油门。
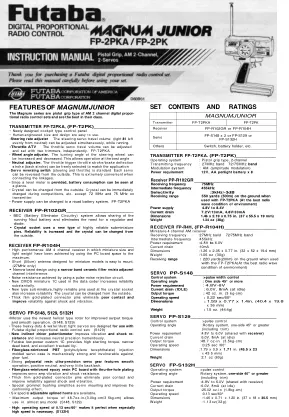
magnum junior 的功能 - 您已到达 ftp.hobbico.com
发射器 FP-T2PKA,(FP-T2PK)_____________ • 新设计的驾驶舱式控制面板 • 人性化的尺寸和设计易于使用。 • 转向速率调节器 可在行驶过程中同时调节转向伺服行程量 (从中立均匀地向右 81 向左)。 • 油门 ATV 油门伺服行程量可以用两个微调器独立调整和设置。FP-T2PKA • 车轮角度调节器。可增加和减少方向盘的转动角度。这样可以以最佳角度操作 • 中立调节器。可自由选择油门扳机油门行程/制动器偏转行程 (后行程) 以匹配应用 • 伺服反转开关 (转向和油门) 是标准配置 每个伺服都可以从外部反转。这在连接连杆时极为方便。 • 由于提供了水平仪,因此可以一目了然地看到电池消耗。 • 可以从外部更换晶体。比赛等期间可立即更换晶体,发射器上的 72 MHz 和 75 MHz 除外。 • 电源可更改为镍镉电池系统。 FP-T2PKA
HW-SMA326DUL00_QUICRUN WP 8BL150&10BL120 G2 ...
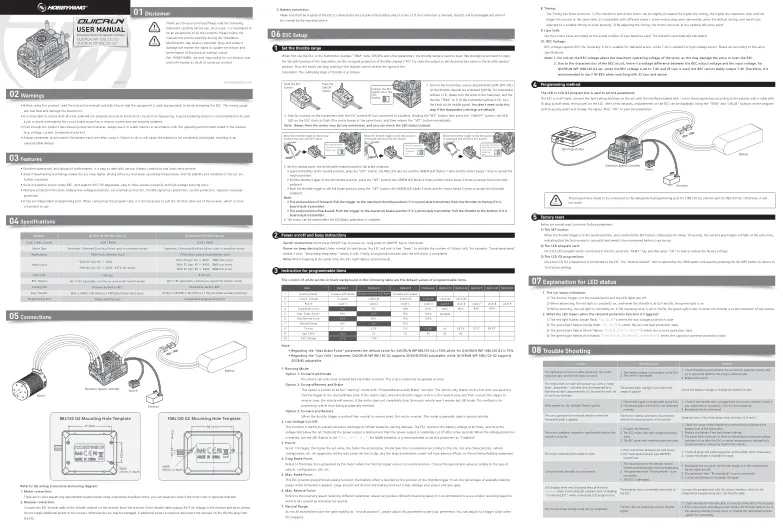
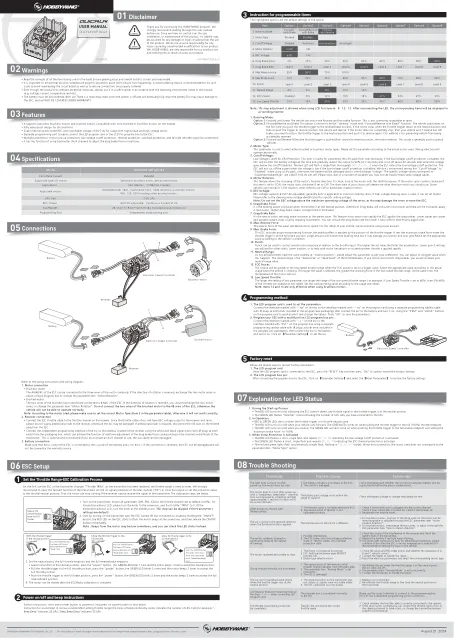
3. 设置中立点、全油门终点和全刹车终点。 • 遥控器在中立位,按“SET”键,红灯灭,绿灯闪1下,电机蜂鸣1声,接受中立位。 • 将油门扳机拉到全油门位置,按“SET”键,绿灯闪2次,电机蜂鸣2声,接受全油门终点。 • 将油门扳机推到全刹车位置,按“SET”键,绿灯闪3次,电机蜂鸣3声,接受全刹车终点。 注意: • 前进终点:手枪式遥控器,将扳机拉到最大油门位置,板式遥控器,将油门推到最上面。 • 后退终点:手枪式遥控器,将扳机推到最大刹车位置。如果是板式遥控器,请将油门拉到最低点。4. ESC/Radio 校准完成后,即可启动电机。
HW-SMA339DUL00_QUICRUN WP MINI24
1。在启动过程中•红色LED打开固体,表明ESC未检测到任何节气门信号,或者油门触发器处于中性位置。•绿色LED闪烁“数量”次数,指示您已连接到ESC的脂质单元的数量。2。操作中•当节气门扳机位于节气门中性区域时,红色和绿色LED消失了。•当您的车辆向前运行时,红色LED打开了固体。将油门扳机拉到完整的油门端点时,绿色LED亮了。•红色LED逆转时,将油门扳机推向完整的反向端点并将“最大制动力”设置为100%时,绿色LED也将亮起。3。激活某些保护•红色LED闪烁短而单一的闪光和重复(☆,☆,☆),指示低压截止保护被激活。•绿色LED闪烁短,单闪存和重复(☆,☆,☆),表明ESC热保护已激活。•红色和绿灯同时闪烁(单个闪光灯,在“☆,☆,☆”模式中闪烁):电动机误差保护,所使用的电动机与参数项目“电动机类型”选项不符。
操作说明,SOLO PRO 319 RTF 2.4... - RC Today
爬升和下降(“油门/俯仰”):控制模型的爬升和下降。 偏航:模型绕垂直轴的运动;直升机向右或向左旋转。 升降舵:模型绕横轴的运动,向前或向后飞行 滚转:模型绕纵轴的运动,向右或向左横向运动 模式 1:相对于操纵杆运动的控制运动功能分配。在这种情况下,总距/电机速度(油门)和滚转由右侧操纵杆控制;俯仰轴和尾桨由左侧操纵杆控制。 模式 2:相对于操纵杆运动的控制运动功能分配。在这种情况下,总距/电机速度(油门)和尾桨由左侧操纵杆控制;俯仰轴和滚转由右侧操纵杆控制。 双速率:可切换控制运动的行程减少。 绑定:在发射器和接收器之间建立无线电链路。

dualsky®XController无刷ESC编程...
1)对于LI-XX电池,自动判断电池的数量,每个电池的低 /中 /高截止电压为:2.5V / 2.75V / 3.0V。2)对于NI-XX电池,低 /中 /高截止电压为启动电压的60% / 65% / 70%。5。启动模式:normal /soft /super-soft,默认是普通启动。正常人适合固定翼飞机。软 /超柔软适合直升机,软 /超柔软模式的初始速度非常慢,1秒(软启动) / 2秒 / 2秒(Super-Soft Soft Startup)从启动到全速。但是,如果油门关闭(油门棒移至底部),然后在第一个启动后的3秒内再次打开(油门棒移动),则该启动将处于正常模式,以摆脱特技飞行中的慢速油门响应引起的崩溃的机会。6。时机:低 /中 /高,默认值是中等的。在正常情况下,大多数电动机都可以使用较低的时机。,但要提高效率,我们建议使用6杆及以上的2杆电动机和中等时机的时间较低。对于更高的速度,可以使用较高的时机。注意:较高的时机可能会引起某些电动机的问题。请先在地面上进行测试!

螺旋桨开发过程:国防部与民航部门之间的冲突与合作
图片列表 图 1 KC-130T 的三视图 3 图 2 AeroUnion P-3 Orion 4 图 3 EPCS 安装位置 7 图 4 螺旋桨开发流程图 10 图 5 KC-130T 油门象限图 16 图 6 油门止动装置 22 图 B-1 HS 测试单元数据 - PLA 瞬态 60-MAX TQ 62 图 E-1 目录,54H60-77E 控制系统飞行测试报告 72

操作说明 - Rapid Electronics
专业术语解释: 电机速度(“油门”):控制模型的爬升和下降。偏航:模型绕垂直轴的运动;直升机向右或向左旋转。俯仰轴:模型绕横轴的运动,向前或向后飞行 滚转:模型绕纵轴的运动,向右或向左横向运动 模式 1:相对于操纵杆的控制运动功能分配。在这种情况下,电机速度(油门)和滚转由右侧操纵杆控制;俯仰轴和尾桨由左侧操纵杆控制。模式 2:相对于操纵杆的控制运动功能分配。在这种情况下,电机速度(油门)和尾桨由左侧操纵杆控制;俯仰轴和滚转由右侧操纵杆控制。双速率:可切换行程减少以控制运动。绑定:在发射器和接收器之间创建无线电链路。
