XiaoMi-AI文件搜索系统
World File Search System激光测距

TrustPoint“时光飞逝”立方体卫星技术描述
有效载荷子系统:有效载荷子系统执行 TrustPoint 的替代定位、导航和授时 (PNT) 服务所需的机载处理、RF 信号生成和高精度计时。有效载荷由用于有效载荷计算和波形生成的数字子系统、GNSS 接收器(参见上面的通信系统部分)、用于计时的时钟子系统和用于放大和过滤的 RF 模拟子系统组成。在总线底盘的外部,有效载荷与两个 C 波段发射天线、一个 C 波段接收天线和一个 GNSS 天线连接,所有这些都是共形非可展开贴片天线。总线底盘的外部还安装了一个激光反射器,用于支持高精度轨道测定的激光测距实验。
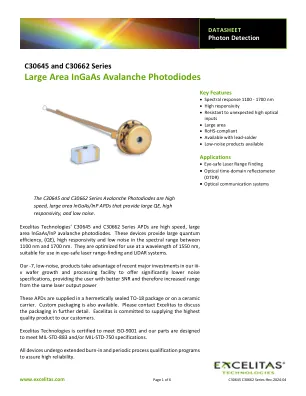
C30645 C30662 系列-修订版 2024-04
Excelitas Technologies 的 C30645 和 C30662 系列 APD 是高速、大面积 lnGaAs/lnP 雪崩光电二极管。这些设备在 1100 nm 至 1700 nm 的光谱范围内提供大量子效率 (QE)、高响应度和低噪声。它们针对 1550 nm 波长进行了优化,适用于人眼安全的激光测距和 LiDAR 系统。我们的 -7 低噪声产品利用我们最近对 iii-v 晶圆生长和加工设施的重大投资,提供显著降低的噪声规格,为用户提供更好的 SNR,从而在相同激光输出功率下增加范围。这些 APD 采用密封的 TO-18 封装或陶瓷载体提供。还提供定制包装。请联系 Excelitas 进一步讨论包装细节。Excelitas 致力于为客户提供最优质的产品。 Excelitas Technologies 已通过 ISO-9001 认证,我们的部件设计符合 MIL-STD-883 和/或 MIL-STD-750 规范。所有设备均经过长时间老化和定期工艺鉴定程序,以确保高可靠性。
未分类 - FI AeroWeb
1W 包括 SIDEWINDER、HELLFIRE 和 TOW 导弹系统、机头下部安装的 20 毫米炮塔炮以及各种前射和重力释放的外部存储。2012 财年预算的修改总体目标是消除安全隐患、提高生存能力、满足作战要求、解决过时问题并保持重要的任务能力。此外,H-1 将继续升级适用的飞机传感器和航空电子系统和子系统以及武器火箭运载系统,其中包括先进精确杀伤武器系统 (APKWS)。此外,还将纳入需要关键可靠性增强的飞行器改进。该平台将继续满足作战要求,在白天、夜晚和恶劣天气下使用精确制导弹药探测、识别和摧毁战术尺寸装甲目标,并利用系统的激光测距和指示系统提供增强的常规武器运载能力。

LiDAR的演变及其在高精度领域的应用...
LiDAR是在1960年Theodore Maiman发明红宝石激光器之后才被广泛认可的,从技术革新来看,LiDAR经历了四个阶段。1960年,Theodore Maiman和他的同事在休斯研究实验室将高功率闪光灯照射在红宝石棒上,触发了一束相干光:第一束激光器。由于激光具有亮度好、方向性好、抗干扰等特点,激光技术被广泛应用于测距。与一般的测量方法相比,它具有精度高、分辨率高、体积小、使用方便、全天候等优点,在对地观测、环境监测、侦察等领域发挥着重要作用。同其他技术一样,激光也引起了军方的重视,很快美国军方就开始了军用激光装置的研究,第一台军用激光测距仪在1961年通过了军方试验,很快就投入了实用化。1971年,美国军方首创了世界上第一台红宝石激光测距系统:AN/GVS-3,这台第一代测距仪由光电倍增管探测器和红色外宝石光激励器组成,由于存在体积大、重量重、功耗大等缺点,很快就被第二代测距系统所取代,该测距系统采用近红外钕激光器(主要是Nd:YAG激光器)和PIN光电二极管或雪崩光电二极管,体积更小,功耗更低。随着这项技术的日趋成熟,随着20世纪70年代YAG激光技术的成熟,应用于长、中、短程激光测距雷达已成为必然趋势,1977年美国研制成功第一台手持式小型激光测距仪。 Nd:YAG激光测距仪:AN/GVS-5型,特点:尺寸与标准7-50军用望远镜相当,总重量只有2kg,适合手持使用,20世纪70年代末到80年代中期,激光测距仪成为军用激光市场上最大的采购项目[10]。起初激光测距主要用于军事和科研,在工业仪器中很少见,因为激光测距传感器太贵,一般在几千美元,高昂的价格一直是阻碍其广泛使用的主要原因。然而,由于技术的重大进步,价格已降至几百美元,使得它有可能成为一种具有成本效益的测量仪器。

机载激光雷达的应用及分析...
a 中国地质大学工程学院,武汉 430074,中国;b 中国测绘科学研究院,北京海淀区北太平路 16 号,100039,- jianfei1123@sina.com;第三委员会,第三工作组/3 关键词:海岸,应用,激光雷达,DEM,测量 摘要:激光雷达(LIDAR)是一种高精度、高密度获取三维坐标的新技术,集激光测距、计算机、GPS(全球定位系统)和 INS(惯性导航系统)于一体。潮间带地形测量是潮间带保护、开发和管理的基础工作,在我国测绘工程中占有十分重要的地位。本文简要介绍了激光雷达技术;然后在对TFACZ(潮滩与海岸带)特点与需求分析的基础上,指出LIDAR技术是解决TFACZ地理数据获取问题最有效的手段;对LIDAR技术在TFACZ地形测量中的应用进行了大量的探讨;最后利用Trimble GPS RTK系统对LIDAR数据的精度进行了检验。 1.引言

测量机载激光扫描仪数据中高度和平面测量差异的方法
摘要 机载激光扫描 (或激光雷达) 已成为获取数字地形模型数据的一种非常重要的技术。除此之外,该技术越来越多地用于获取点云,以对各种物体进行建模,例如建筑物、植被或电力线。作为一种主动技术,机载激光扫描即使在图像对比度较差的地形上也能提供高可靠性。该技术的精度通常规定为一到两分米的数量级。由于其主要用于数字地形建模,迄今为止对机载激光扫描精度潜力的检查主要集中在高度精度上。随着该技术用于一般重建任务和激光扫描仪系统分辨率的提高,激光扫描仪点云的平面精度成为一个重要问题。除了激光测距仪和偏转镜系统中的误差外,机载激光扫描仪的误差预算还受到用于传感器姿态 [位置和方向] 确定的 GPSI INS 系统的强烈影响。这些系统的误差通常会导致激光扫描仪数据条带变形,并且可能表现为激光扫描仪数据块中相邻条带重叠区域的差异。本文介绍了在 TIN 结构上实施的最小二乘匹配,作为确定激光扫描仪
UKSA SDA 研究
AI 人工智能 CASTR 奇尔博尔顿先进卫星跟踪雷达 CNI 关键国家基础设施 COATS 奇尔博尔顿光学先进跟踪系统 COLA 发射碰撞评估 CSpO 联合空间作战计划 DSS 英国国防空间战略 EGNOS 欧洲地球静止导航覆盖服务 EoL 寿命终止 ESA 欧洲航天局 ESG 环境、社会和治理 EUSST 欧洲空间监视和跟踪 GEO 地球静止轨道 GNOSIS 全球空间可持续发展网络 GNSS 全球导航卫星系统 IADC 机构间空间碎片协调委员会 ICAO 国际民用航空组织 ICT 信息通信技术 IOSM 在轨服务和制造 ISR 情报、监视和侦察 LEO 低地球轨道 MEO 中地球轨道 MOSWOC 气象局空间气象作业中心 MoD 英国国防部 NSpOC 国家空间作业中心 NSS 英国国家空间战略 PIMS 被动成像公制传感器 PNT 定位、导航和授时 ROI 回报率投资 SDA 空间领域感知 SLR 卫星激光测距 SSA 空间态势感知 SST 空间监视与跟踪 STEM 科学、技术、工程和数学 STFC 科学与技术设施委员会 STM 空间交通管理 UHF 超高频 UKRI 英国研究与创新 US SSN 美国空间监视网络

NPL 报告 ENG 59 对使用... 的初步调查
1 简介 三维 (3D) 激光扫描仪多年来一直用于文化遗产、法医、3D 土地(地形)和“竣工”测量等应用。三维激光扫描仪使用安装在快速旋转头上的高速激光测距仪扫描环境,从而产生场景的高密度数字点云表示,可以根据需要进行存档和分析。通常,同轴安装的相机会同时记录全彩信息,以提供更逼真的 3D 图像。近年来,激光扫描仪的测距能力得到了提高,可以在数十米或更长的距离上实现亚毫米级精度和测距噪声。事实上,美国国家标准与技术研究所 (NIST) 最近报告称,他们开发了一款精度为 10 µm、测量范围为 10.5 m 1 的 3D 扫描仪。精度的提高,加上高价值制造业以及逆向工程和工厂维护等应用对以相对较低的成本快速获取高质量数据的要求不断提高,促使三维激光扫描仪从测量应用转向工程应用。随着 3D 激光扫描仪技术的普及和对精度要求的不断提高,对校准、性能验证和测量可追溯性的需求也随之增加。非接触式光学测量系统的校准和可追溯性问题非常复杂,不仅限于仪器本身系统误差的校准和补偿。例如,由于扫描激光与被扫描物体的材料和表面特性之间的相互作用以及激光束与表面的入射角,可能会出现显著的系统误差。然而,对于本文考虑的 3D 激光扫描仪类别,测距精度水平取决于仪器的几何误差和激光测距系统的精度。激光测距系统的校准相对简单,可以使用例如校准的长度工件或更精确的坐标测量系统(如激光跟踪器)或通过与参考干涉仪进行比较来进行。但是,没有涵盖激光扫描仪校准或性能验证的文献标准。在本报告的第 2 部分中,我们简要描述了激光扫描仪几何误差的数学模型。此外,NIST 进行的体积性能测试表明,校准后系统误差仍然很明显,这些误差可以归因于对几何对准误差的不完全补偿 2, 3 。因此,需要改进这些设备的校准方式,以充分发挥其潜力。因此,国家物理实验室 (NPL) 对使用“网络方法”校准 3D 扫描仪几何误差的可行性进行了初步调查 - 该方法之前由 NPL 为激光跟踪器校准而开发 4, 5 。在第 3 节中,我们总结了用于校准仪器误差的网络方法。在第 4 节中,我们介绍了用于测试激光扫描仪的方法。第 5 节介绍了结果和观察结果,第 6 节介绍了最后的总结和结论。2 激光扫描仪的几何误差模型 图 1 显示了激光扫描仪内部几何形状的理想表示。安装在固定底座上的旋转平台承载着激光源和旋转镜组件;平台绕着竖轴 Z 旋转。激光源的对准方式是使激光束与旋转镜的旋转轴(称为过境轴 T )同轴对准。激光束在点 O 处从旋转镜反射,该点位于镜面与旋转轴 T 和 Z 的交点处。镜子相对于轴 T 倾斜 45°,使得激光束从镜子反射到 NZ 平面上的点 P,其中 ON 垂直于 OT。

特刊 - 德国联邦物理技术研究院
随着对光和物质波场的量子性质的研究取得最新进展,量子工程这一新领域应运而生。量子工程为量子计量学测试基本物理定律开辟了新视野,在空间和时间测量方面达到了前所未有的精度水平。相关的新型量子技术催生了原子钟和传感器,可在全球大地测量、惯性传感、导航和激光测距中得到广泛应用。德国联邦物理技术研究院 (PTB) 一直致力于开发超越最先进水平的精密测量技术。多年来,PTB 与汉诺威莱布尼茨大学 (LUH) 一直有着出色的合作伙伴,尤其是数学、物理和大地测量学院的研究所,以及马克斯普朗克引力物理研究所 (Albert Einstein Institute, AEI),这些研究所在量子工程和密切相关领域开展着顶级研究。此外,与汉诺威激光中心 (LZH) 和不来梅大学应用空间技术和微重力中心 (ZARM) 的密切合作已被证明是卓有成效的。这个强大的社区是最终导致建立 QUEST(量子工程和时空研究中心)的先决条件,该中心是汉诺威莱布尼茨大学的卓越中心。因此,QUEST 汇集了这些合作伙伴的杰出专业知识,以在汉诺威-布伦瑞克地区共享知识并提高该地区的实力。该集群的核心思想是将量子工程、量子传感器、时空和使能技术这四个主要研究领域联系起来,并建立有前景的研究活动,特别是在这些领域的交界处。因此,PTB、LUH、AEI、LZH 和 ZARM 之间的未来合作将通过各种 QUEST 措施得到系统加强,例如通过在 PTB 校园内建立联合教授职位和研究小组。在本出版物中,读者将获得 QUEST 合作伙伴的概述以及 PTB 正在进行和计划中的 QUEST 相关研究活动。我们希望 PTB 的新 QUEST 研究所能够不负众望,为量子工程和时空研究的科学技术做出领先贡献。我们希望您喜欢阅读本期内容。
特刊 - Physikalisch-Technische Bundesanstalt
随着对光和物质波场的量子性质的研究取得最新进展,量子工程这一新领域应运而生。量子工程为量子计量学测试基本物理定律开辟了新视野,在空间和时间测量方面达到了前所未有的精度水平。相关的新型量子技术催生了原子钟和传感器,可在全球大地测量、惯性传感、导航和激光测距中得到广泛应用。德国联邦物理技术研究院 (PTB) 一直致力于开发超越最先进水平的精密测量技术。多年来,PTB 与汉诺威莱布尼茨大学 (LUH) 一直有着出色的合作伙伴,尤其是数学、物理和大地测量学院的研究所,以及马克斯普朗克引力物理研究所 (Albert Einstein Institute, AEI),这些研究所在量子工程和密切相关领域开展着顶级研究。此外,与汉诺威激光中心 (LZH) 和不来梅大学应用空间技术和微重力中心 (ZARM) 的密切合作已被证明是卓有成效的。这个强大的社区是最终导致建立 QUEST(量子工程和时空研究中心)的先决条件,该中心是汉诺威莱布尼茨大学的卓越中心。因此,QUEST 汇集了这些合作伙伴的杰出专业知识,以在汉诺威-布伦瑞克地区共享知识并提高该地区的实力。该集群的核心思想是将量子工程、量子传感器、时空和使能技术这四个主要研究领域联系起来,并建立有前景的研究活动,特别是在这些领域的交界处。因此,PTB、LUH、AEI、LZH 和 ZARM 之间的未来合作将通过各种 QUEST 措施得到系统加强,例如通过在 PTB 校园内建立联合教授职位和研究小组。在本出版物中,读者将获得 QUEST 合作伙伴的概述以及 PTB 正在进行和计划中的 QUEST 相关研究活动。我们希望 PTB 的新 QUEST 研究所能够不负众望,为量子工程和时空研究的科学技术做出领先贡献。我们希望您喜欢阅读本期内容。