XiaoMi-AI文件搜索系统
World File Search System码流

CP4375-3-流码
FlowCode是一个软件程序,允许用户以简单的方式快速,轻松地开发复杂的电子系统,可与一系列微控制器一起使用,包括Microchip的“ PIC'Microcrocontrollers(PIC MCUS),Arduino和Arm”。FlowCode本身是微控制器中性的 - 无论使用哪种微控制器,它几乎与用户界面相同。差异在硬件和程序下载和测试的方式中。

空间耦合LDPC码的分层译码算法
图 5 给出了所提 LSWD 算法和 SWD 算法在不同 迭代次数时的比特错误概率 (Bit Error Ratio, BER) 曲线,其中最大迭代次数分别取为 5 和 10 。 图 6 给出 了两种算法的译码性能与最大迭代次数的关系,其 中信噪比分别为 2.5 dB, 4.0 dB 。综合分析 图 5 和 图 6 的仿真结果,可以看出: (1) 所提算法和现有文献 的 SWD 算法的误码性能曲线都有明显的瀑布区。 (2) 当迭代次数相同时,所提算法的性能优于 SWD 算法。如,当译码迭代为 50 次、译码窗长度为 9 时,为达到 10 –6 BER ,所提算法所需的信噪比值 为 3.9 dB ,而目前常用的 SWD 算法则需要 4.2 dB , 所提算法约有 0.3 dB 的性能优势。 (3) 在译码性能 基本相同时,与 SWD 算法相比,所提算法可以明 显减少译码迭代次数。例如,当信噪比为 2.5 dB 时,为了获得 10 –3 的 BER ,所提算法和 SWD 算法所 需的迭代次数分别为 7 和 11 ;当信噪比为 4.0 dB 时,为了达到 10 –5 的 BER ,所提算法和 SWD 算法所 需的迭代次数分别为 12 和 20 ,此时所提算法的迭代
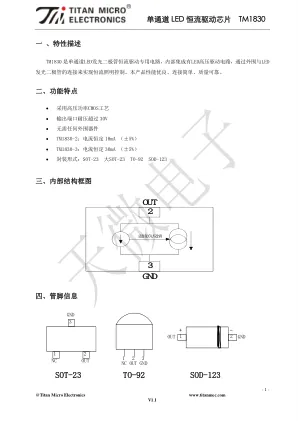
单通道LED 恒流驱动芯片TM1830
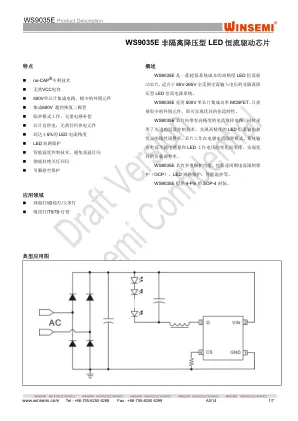
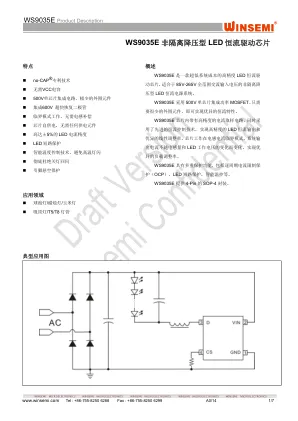
如图1 所示,要使TM1830 工作在恒流状态下,芯片OUT 引脚上电压应大于2.2V,即芯片的2、3 脚之间的电压应达到2.2V 以上。在应用时,电源串接LED 灯后加在OUT 引脚上的电压建议在3.0V 左右。 如果芯片持续工作在额定恒流状态下,TM1830-2 和TM1830-3 的OUT 引脚电压应分别在12.0V 和8.0V 以内为宜。
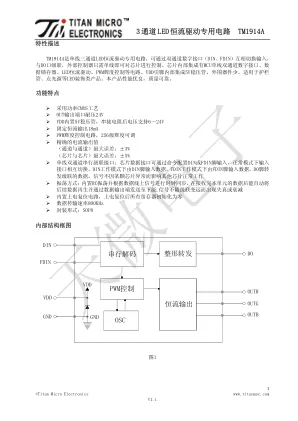
3通道LED恒流驱动专用电路TM1914A
功能说明 1、模式设置 本芯片为单线双通道通讯,采用归一码的方式发送信号。芯片接收显示数据前需要配置正确的工作 模式,选择接收显示数据的方式。模式设置命令共48bit,其中前24bit为命令码,后24bit为检验反码, 芯片复位开始接收数据,模式设置命令共有如下3种: (1)0xFFFFFF_000000命令: 芯片配置为正常工作模式。在此模式下,首次默认DIN接收显示数据,芯片检测到该端口有信号输 入则一直保持该端口接收,如果超过300ms未接收到数据,则切换到FDIN接收显示数据,芯片检测到该 端口有信号输入则一直保持该端口接收,如果超过300ms未接收到数据,则再次切换到DIN接收显示数据。 DIN和FDIN依此循环切换,接收显示数据。 (2)0xFFFFFA_000005命令: 芯片配置为DIN工作模式。在此模式下,芯片只接收DIN端输入的显示数据,FDIN端数据无效。 (3)0xFFFFF5_00000A命令: 芯片配置为FDIN工作模式。在此模式下,芯片只接收FDIN端输入的显示数据,DIN端数据无效。 2、显示数据

WS9032G 非隔离降压型LED 恒流驱动芯片 - NET
X-ON Electronics Largest Supplier of Electrical and Electronic Components Click to view similar products for LED Display Drivers category: Click to view products by Winsemi manufacturer: Other Similar products are found below :