XiaoMi-AI文件搜索系统
World File Search System磁带驱动器

COMMANDER S100 驱动器规格
*配备 C3 EMC 滤波器的 Commander S100 型号符合 IEC 61800-3 第二环境。配备 C3 EMC 滤波器的 Commander S100 型号需要额外的外部滤波器才能满足 IEC 61000-6-4 和 IEC 61800-3 第一环境的更高要求。配备 C1 EMC 滤波器的 Commander S100 型号无需额外滤波即可满足 IEC 61000-6-4 和 IEC 61800-3 第一环境的要求。

电动驱动器的车辆技术发展
汽车制造商密切关注客户的喜好。基于观察到电动汽车的兴趣增加以及电动型号的销售增加,汽车制造商的要约形成了。旨在获得更大份额的电动汽车市场的汽车制造商提供各种型号,并具有电动驱动器,以吸引越来越多的消费者。每个乘用车制造商的优惠包括带有混合动力或电动驱动器的型号。在小型和城市乘用车以及跑车和SUV的领域都观察到了这些趋势。根据报告[62],在过去的两年中,所有汽车制造商的销量都在增加。电动驱动技术的开发也在轻型商用车中进行。已经开发了电动和混合重型车辆。他们目前是广泛的测试和研究的主题[37]。研究表明,有兴趣购买电动汽车的消费者主要关注其范围,
电力电子、机械和驱动器
我要向主要作者表示诚挚的谢意:Moushumi Mohanty 女士、Mrinal Tripathi 女士、Rohit Garg 先生、Anannya Das 女士(科学与环境中心 (CSE));Raghunathan 博士(印度理工学院马德拉斯分校);Sajid Mubashir 先生(已退休),DST;Arghya Sardar 先生(TIFAC);Parveen Kumar 博士(世界资源研究所印度分部);Suuhas Tendulkar 先生(ERF Global);Veena Koodli-Robert Bosch 女士;以及 N Mohan 先生(CESL),他们起草了初稿,并为这些文件的定稿做出了巨大贡献。我要特别感谢 ARAI 主任 Reji Mathai 博士审查了电动汽车充电基础设施研发路线图。

基因驱动器,蚊子和生态系统
基因驱动器是性生殖的遗传元素,比通过孟德尔时尚传播的生物传播的速度快。可以设计基因驱动器来修改生理学和繁殖的不同方面,因此已提议它们作为控制媒介传播疾病的一种新的和革命性的工具,尤其是那些疾病,尤其是那些由属的Anopheles和Aedes(Culicidae)传播的疾病,例如Malaria,Malaria,Dengue和Zika Virus。这种方法可能会通过降低这种毁灭性疾病的传播来影响人类健康。但是,将基因修饰的蚊子(或其他物种)释放到环境中提出了一系列与静止技术有关的问题,以及我们对陆生和水生生态系统的复杂结构和动态的当前理解。此外,人们对自然生态系统中人类干预的道德问题最终可能会影响我们的生活方式或生态系统本身。这项工作是一种跨学科的方法,它从生物学,哲学和神学的角度分析了潜在的生态影响对自然环境的释放遗传修饰物种的释放,重点是基因驱动驱动驱动器模型的蚊子。从天主教的角度来看,它包括神学方法(尽管其他基督徒很容易共享),因为我们认为世界宗教具有宝贵的见解,即使并不是每个人都可以分享他们的基础。我们得出的结论是,焦点问题是人类与自然之间的关系,遗传修饰物种的释放可能会不可预测地改变这种关系。然而,鉴于生态系统中的复杂互动,诸如地球管理原则之类的新方法可以提供新的,更广泛的答案,涉及生物学,哲学和神学概念,这些概念将帮助所有相关参与者互动,以使世界变得更美好。
用于 HPE 磁带自动化的条形码和 RFID 标签 - Tri-Optic
与其他语言一样,条形码技术已发展为适用于不同应用的许多符号体系。已开发了 200 多种不同的条形码符号体系。最熟悉的符号体系是用于食品等消费品的通用产品代码 (UPC)。UPC 标签简单、格式严格,旨在让高度复杂的阅读器读取低质量的标签。商品上的 UPC 代码具有在手持阅读器或多光束扫描仪可以移动到标签上许多位置的环境中使用的优势。可能需要扫描数百次才能确定良好的扫描效果。校验和包含在编码方案中以验证扫描。作为最后的手段,UPC 标签通常具有人可读部分,可由操作员输入到终端中。
用于 HPE 磁带自动化的条形码和 RFID 标签 - Tri-Optic
与其他语言一样,条形码技术已发展为适用于不同应用的许多符号体系。已开发了 200 多种不同的条形码符号体系。最熟悉的符号体系是用于食品等消费品的通用产品代码 (UPC)。UPC 标签简单、格式严格,旨在让高度复杂的阅读器读取低质量的标签。商品上的 UPC 代码具有在手持阅读器或多光束扫描仪可以移动到标签上许多位置的环境中使用的优势。可能需要扫描数百次才能确定良好的扫描效果。校验和包含在编码方案中以验证扫描。作为最后的手段,UPC 标签通常具有人可读部分,可由操作员输入到终端中。

F-16 A/B 中期更新 - 生产磁带 M3
降级操作................................................................................................................42 使用 OAP 或 RP 进行目标仰角测量......................................................................42 训练核武器参数显示................................................................................43 提前拉起时的武器释放指示......................................................................43 5 防御性航空电子设备.........................................................................................................44 EWMS/甲壳更新.........................................................................................................44 EWMS 更新....................................................................................................................44 甲壳更新.........................................................................................................................44 降级操作.........................................................................................................................46 导弹预警系统.............................................................................................................47 MWS 安装.........................................................................................................................47 导弹预警符号.............................................................................................................47 声音警告.........................................................................................................................48 前向发射火箭弹和导弹.........................................................................................................49 降级操作.........................................................................................................................49 威胁区域避让符号................................................................................49 6 头盔提示系统..............................................................................................50 系统组件..............................................................................................................50 电子装置..............................................................................................................50 控制面板..............................................................................................................51 驾驶舱装置.........................................................................................................................51 头盔显示装置.........................................................................................................................51 磁性发射机装置.........................................................................................................................52 座椅位置传感器.........................................................................................................................52 NVG 兼容性.........................................................................................................................52 头盔-车辆接口.........................................................................................................................53 快速断开.........................................................................................................................53 直列释放.........................................................................................................................54 头盔释放连接器................................................................................................54 头盔佩戴....................................................................................................................55 驾驶舱磁力测绘...................................................................................................55 程序....................................................................................................................55 飞机尾号................................................................................................................56 头盔运动盒.........................................................................................................................57 基本操作.................................................................................................................57 OFP 识别.................................................................................................................57 内置测试和故障报告....................................................................................................58 座舱盖校正....................................................................................................................58 昼夜自动显示强度 (HMCS)................................................................................59 控制页面....................................................................................................................60 实际操作 HMCS 消隐................................................................................................66 初始化....................................................................................................................67 HMCS 窗口放置................................................................................................67 HMCS 符号列表................................................................................70 时间同步 ................................................................................................73 滑行前的操作程序 ......................................................................................73................................................................................................58 昼夜自动显示强度 (HMCS) ..............................................................................59 控制页面..............................................................................................................60 实际操作 HMCS 消隐..............................................................................................66 初始化................................................................................................................67 HMCS 窗口放置.........................................................................................................67 HMCS 符号列表.........................................................................................................70 时间同步.........................................................................................................................73 滑行前操作程序.........................................................................................................73................................................................................................58 昼夜自动显示强度 (HMCS) ..............................................................................59 控制页面..............................................................................................................60 实际操作 HMCS 消隐..............................................................................................66 初始化................................................................................................................67 HMCS 窗口放置.........................................................................................................67 HMCS 符号列表.........................................................................................................70 时间同步.........................................................................................................................73 滑行前操作程序.........................................................................................................73

HBA 最佳实践 - 磁盘和磁带流量分离
某些 HBA 驱动程序版本不支持磁带。如果接受为并发磁盘和磁带实施 HBA 的风险,工程师应确认驱动程序同时支持磁盘和磁带功能。这也适用于主机端应用程序。新的驱动程序(例如 Microsoft 的 Storport 驱动程序)必须同时得到备份应用程序和存储设备的支持。对于可能不使用最新 HBA 驱动程序版本或修改后的驱动程序版本的 PowerPath 等主机端故障转移应用程序,驱动程序支持尤其重要。通常,这些应用程序使用不同的驱动程序来提供故障转移或其他供应商独有的功能,而这些功能尚未通过所有存储设备的认证。

2G HTS涂层导体磁带的价值预测
摘要:索引值或所谓的n值预测对于理解超导体的行为至关重要,特别是需要对超导体建模时。此参数取决于几个物理量,包括温度,磁场的密度和方向,并影响由涂层导体制成的HTS设备的行为,从损失和淬火繁殖方面。在本文中,对许多用于估计N值的机器学习方法进行了全面分析。结果表明,级联向前神经网络(CFNN)在此范围内擅长。与其他尝试的模型相比,尽管需要较高的训练时间,但它的性能最高,具有0.48的均方根误差(RMSE)和99.72%的Pearson系数,具有拟合度(R-Squared)。另一方面,刚性回归方法的预测最差为4.92 RMSE和37.29%的R平方。此外,随机森林,增强方法和简单的馈电神经网络可以被视为比CFNN更快的训练时间的中间精度模型。这项研究的结果不仅提前对超导体进行了建模,而且还为应用程序的应用铺平了道路,并为机器学习插件代码进行了进一步研究,以进行超导研究,包括对超导设备进行建模。
PBL 3775/1 双步进电机驱动器
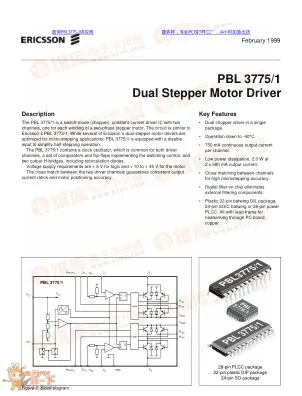
2 1 [8] M B1 电机输出 B,通道 1。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。 3 2 [10] E 1 共发射极,通道 1。此引脚连接到传感电阻 RS 到地。 4 3 [11] M A1 电机输出 A,通道 1。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。 5 4 [12] V MM1 电机电源电压,通道 1,+10 至 +40 V。V MM1 和 V MM2 应连接在一起。 6,7 5, 6, [1-3, 9, GND 接地和负电源。注意:这些引脚用于散热。 18,19 17, 18 13-17, 确保所有接地引脚都焊接到适当大的铜接地平面 28] 上,以实现有效散热。 8 7 [18] V R1 参考电压,通道 1。控制比较器阈值电压,从而控制输出电流。 9 8 [19] C 1 比较器输入通道 1。该输入感测感测电阻两端的瞬时电压,由内部数字滤波器或可选外部 RC 网络滤波。 10 9 [20] 相位 1 控制输出 M A1 和 M B1 处的电机电流方向。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。 11 10 [21] Dis 1 通道 1 的禁用输入。当为高电平时,所有四个输出晶体管都关闭,导致输出电流迅速减小至零。 12 11 [22] RC 时钟振荡器 RC 引脚。将一个 12 kohm 电阻连接到 V CC ,并将一个 4 700 pF 电容连接到地,以获得 23.0 kHz 的标称开关频率和 1.0 µ s 的数字滤波器消隐时间。 13 12 [23] V CC 逻辑电压电源,标称值为 +5 V。 14 13 [24] Dis 2 通道 2 的禁用输入。当为高电平时,所有四个输出晶体管都将关闭,从而导致输出电流迅速减小到零。 15 14 [25] 相位 2 控制输出 M A2 和 M B2 处的电机电流方向。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。 16 15 [26] C 2 比较器输入通道 2。该输入感测传感电阻两端的瞬时电压,该电压由内部数字滤波器或可选的外部 RC 网络滤波。 17 16 [27] V R2 参考电压,通道 2。控制比较器阈值电压,从而控制输出电流。 20 19 [4] V MM2 电机电源电压,通道 2,+10 至 +40 V。V MM1 和 V MM2 应连接在一起。 21 20 [5] M A2 电机输出 A,通道 2。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。 22 21 [6] E 2 共发射极,通道 2。此引脚连接到接地的传感电阻 RS。 23 22 [7] M B2 电机输出 B,通道 2。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。1,24 NC SO 引脚 1 和 24 为“未连接”