XiaoMi-AI文件搜索系统
World File Search System类间

计划间安排
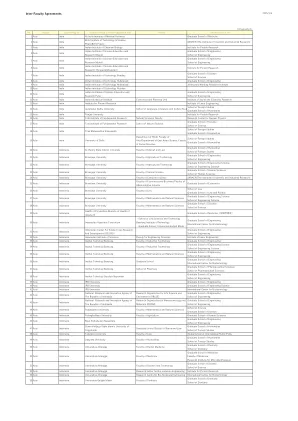
如果您位于美国、波多黎各联邦和美属维尔京群岛(以下简称“BlueCard 服务区”)之外,在获取承保的医疗保健服务时,您可能能够利用 Blue Cross Blue Shield Global® Core。Blue Cross Blue Shield Global® Core 在某些方面与 BlueCard 服务区提供的 BlueCard 计划不同。例如,尽管 Blue Cross Blue Shield Global® Core 可帮助您访问住院、门诊和专业医疗服务提供者网络,但该网络并非由 Host Blue 提供服务。因此,当您从 BlueCard 服务区以外的医疗服务提供者处接受护理时,您通常必须向医疗服务提供者付款并自行提交索赔才能获得这些服务的报销。

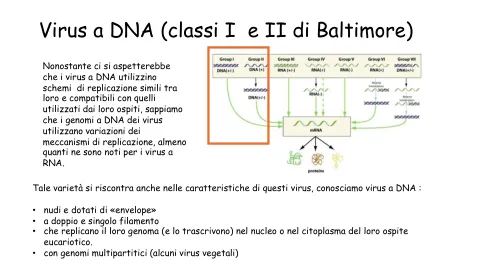
DNA 病毒(巴尔的摩 I 类和 II 类)
• 基因组约为 8 kbp • 它们产生两个同向转录本,其差异剪接产生 8-9 种蛋白质 • 转录可从至少两个启动子开始(P 97、P 670)。第一个是早期基因的启动子,第二个是晚期基因的启动子。 • 来自不同启动子的转录本使用不同的终止子(pAE)• 转录本:• P 97 -pAE 导致蛋白质 E6、7、1、5 的剪接和合成。• P 670 -pALs 导致蛋白质 E4、L1 和 L2 的剪接和合成。 • LCR(长控制区)序列包含与启动子相关的增强子。 • E2 蛋白的完整形式作为启动子(特别是早期启动子)的转录激活剂发挥作用,并与 E1 一起诱导复制(在 LCR 中)。

语义增强图像-文本预训练模型的零样本三维模型分类
Cheraghian 等人 [ 21 – 23 ] 在零样本 3 维模型分类方 面提出了 3 维点云的零样本学习方法、缓解 3 维零样 本学习中枢纽点问题的方法和基于直推式零样本学 习的 3 维点云分类方法,并将它们封装进一个全新 的零样本 3 维点云方法 [ 24 ] 中。以上方法均是利用已 知类样本的点云表征及其词向量对未知类别进行分 类,开创了零样本 3 维模型分类方法。近年来, CLIP 在零样本图像分类上取得了良好的效果,因此有研 究者将 CLIP 应用到零样本 3 维模型分类方法中, Zhang 等人 [ 25 ] 提出了基于 CLIP 的 3 维点云理解 (Point cloud understanding by CLIP, PointCLIP) 模型, PointCLIP 首先将 3 维点云投影成多个深度图,然 后利用 CLIP 的预训练图像编码器提取深度图特 征,同时将类别名称通过 CLIP 预先训练的文本编 码器提取文本特征。但是 PointCLIP 的性能受到深 度图和图像之间的域差异以及深度分布的多样性限 制。为了解决这一问题,基于图像 - 深度图预训练 CLIP 的点云分类方法 (transfer CLIP to Point cloud classification with image-depth pre-training, CLIP2Point) [ 26 ] 将跨模态学习与模态内学习相结合 训练了一个深度图编码器。在分类时,冻结 CLIP 的图像编码器,使用深度图编码器提取深度图特 征,该方法缓解了深度图和图像间的模型差异。用 于 3 维理解的图像 - 文本 - 点云一致性表征学习方法 (learning Unified representation of Language, Im- age and Point cloud for 3D understanding, ULIP) [ 27 ] 构建了一个图像、文本和点云 3 种模态的 统一嵌入空间,该方法利用大规模图像 - 文本对预 训练的视觉语言模型,并将 3 维点云编码器的特征 空间与预先对齐的视觉 - 文本特征空间对齐,大幅 提高了 3 维模型的识别能力。与之相似的是,基于 提示文本微调的 3 维识别方法 (CLIP Goes 3D, CG3D) [ 28 ] 同样使用 3 元组形式确保同一类别的 3 维模 型特征和图像特征之间以及 3 维模型特征和文本特 征之间存在相似性,从而使点云编码器获得零样本 识别的能力。另外, PointCLIP V2 [ 29 ] 在 Point- CLIP 的基础之上,通过利用更先进的投影算法和 更详细的 3 维模型描述,显着提高了零样本 3 维模型 分类准确率。本文采用语义增强 CLIP 解决图像和文 本的语义鸿沟问题,通过在语义层面为图像和文本 提供更多相似的语义信息,使图像和文本对齐更具有 一致性,从而有效提高 3 维模型的零样本分类性能。 2.2 提示工程
促进多设备间的信息传输
图 3.7:模型工作流程 ............................................................................................................................................. 27 图 4.1:环境包含:2 台计算机、屏幕、打印机和打印在它们上方的二维码 ............................................................................................. 31 图 4.2:(A)上图显示第二台计算机的文件,其中包含 IP 地址 192.186.1.3 和 ...... 32 图 4.3:用户佩戴 VR 眼镜 ............................................................................................................................. 33 图 4.4:眼镜包含一个可放置移动设备的轨道 ............................................................................................................. 33 图 4.5:显示增强现实UI ................................................................................ 34 图 4.6:文件类型和图标 .......................................................................................................................... 34 图 4.7:通过手指编号,我们可以检查手是闭合的还是张开的 ................................................................................ 35 图 4.8:我们的系统检测到闭合的手和姿势,在顶部我们可以看到手指编号和

人工智能与种间规律
多位专家已警告人工智能 (AI) 即将超越人类的能力,达到一个“奇点”,届时人工智能可能会发展到超出人类控制的程度。这是否会发生仍是一个推测问题。然而,法律奇点正在到来:不受人类指挥的非人类实体可能首次作为法律主体的新“物种”进入法律体系。这种“跨物种”法律体系的可能性为我们思考如何构建和管理人工智能提供了机会。我们认为,法律体系可能比许多人认为的更能接受人工智能代理。与其试图禁止强大的人工智能的发展,不如将人工智能包装成法律的形式,通过定义法律行动的目标、提供改善人工智能治理的研究议程、将法律嵌入人工智能代理以及培训人工智能合规代理,从而减少不良的人工智能行为。

泌尿外科间协调委员会会议
朱莉娅·巴尔索德(Julia Barthold)博士欢迎与会者参加当时的属神学间协调委员会(UICC)的会议。她解释说,国会授权UICC鼓励参与泌尿外科研究,护理和公共卫生活动的所有联邦机构之间的合作,沟通和合作。NIDDK认识到有必要更好地协调联邦对泌尿外科条件的反应,并通过UICC努力促进讨论,以征求有关减少泌尿科疾病负担的计划和想法的反馈。今天的会议着重于在泌尿科条件下增强对肥胖症的认识和管理。为了构建当天的讨论,她提出了以下问题以供考虑:当前和未来的临床和翻译研究如何在这些重叠人群中为护理标准提供信息?
发射,间部署和轨道运输
(CBOD)夹具带打开装置(CDS)立方体设计规范(CSLI)立方体发射计划(CSOS)客户空间对象(DPAF)双有效载荷附加配件(EAGLE)ESPA ESPA ESPA ESPA ESPA ESPA ESPA ESPA ESPA ESPASESTAILARE实验室实验(EELV)EELV EELV EALVEABLABLE SPACE ERPORABL ABOREVER EVEREDEND PRECTEND WAMERATION(ENANORCSD)CUBSASD CUBSACTA CUBSACTA CUDAATA(ESATESD)(ESATASD) EELV二级有效载荷适配器(GEO)地静止赤道轨道(HEO)高度椭圆形轨道(ISS)国际空间站(J-SSOD)JEM小型卫星轨道轨道轨道(JAXA)日本航空航天勘探局(JEM)日本实验模块(JEMRMS)日本实验模块的远程模块化(JEMRMS) (M-OMV) Minotaur Orbital Maneuvering Vehicle (MEO) Medium Earth Orbit (MET) Microwave Electrothermal Thrusters (MLB) Motorized Light Bands (MPAF) Multi Payload Attach Fittings (MPEP) Multi-Purpose Experiment Platform (NICL) Nanoracks Interchangeable CubeSat Launcher (NOAA) National Oceanic and Atmospheric Administration (NRCSD) Nanoracks ISS立方体外部部署(OMV)轨道机动车辆(OTV)轨道运输车辆(PCBM)Cygnus Cygnus被动式泊位机制(RUG)乘车用户指南(SL-OMV)小型发射轨道轨道操纵车辆(SSMS)