XiaoMi-AI文件搜索系统
World File Search System精确的


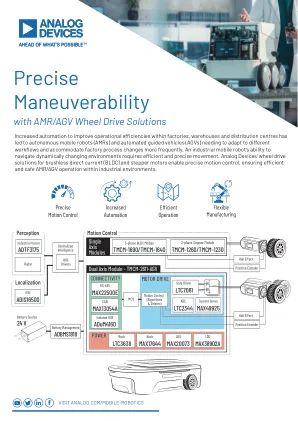
与AMR-AGV-WHEEL-DRIVE-...
提高自动化以提高工厂,仓库和配送中心的运营效率,导致了自动移动机器人(AMR)和自动化的导向车辆(AGV),需要适应不同的工作流量并更频繁地适应工厂流程。工业移动机器人能够导航动态变化的环境的能力需要有效而精确的运动。用于无刷直流电(BLDC)和步进电动机的模拟设备的车轮驱动解决方案可实现精确的运动控制,从而确保在工业环境中有效且安全的AMR/AGV操作。


非局部性作为BCS超导体纯量子动力学的来源
我们表明,远离平衡超导的经典描述在局部可观察物的热力学极限中是精确的,但分解了全球数量,例如纠缠熵或loschmidt回声。我们通过解决并比较BCS超导体的精确量子和精确的经典长期动力学来做到这一点,并与时间成反比相互作用强度并明确评估局部可观察物。平均值对于热力学极限的正常平均值和异常平均(超导顺序)都是精确的。但是,对于异常的期望值,此极限并不能以绝热和强的耦合极限上下通勤,因此,它们的量子发光可能异常强。系统的长时间稳态是一种无间隙的超导体,仅通过能量解析测量值才能访问其超流体性能。这种状态是非热的,但符合新兴的广义吉布斯集团。我们的研究清楚地表达了对称性破碎的多体状态的性质,并在时间依赖性量子集成性理论中平衡和填补了一个关键的差距。