XiaoMi-AI文件搜索系统
World File Search System红外摄像机

David BombaraDavid Bombara
·进行了有关低地球轨道(LEO)资格和测试的文献,包括原位评估任务和模拟LEO环境。·开发了一种用于使用线性可变滤波器和红外摄像机对相位更改可调节滤波器进行自动实时表征的系统,用于广泛的中波红外红外成像·技能:MATLAB,C/C ++,C/C ++,电路,电路的拟合,科学撰写。·参考:Hyun Jung Kim,博士,hyunjung.kim@nasa.gov

出入口 AI LPR 子弹头摄像机
卓越的图像质量(支持星光传感器、智能红外 II 技术和高帧率,以获得出色的图像质量。) LPR 智能搜索(通过搜索目标嫌疑车辆的部分特征,如车辆类型和颜色、车牌颜色、车牌号、方向等,即可快速找到相关视频)

基于事件摄像机的实时手势识别...
摘要 - 在高分辨率事件摄像机的能力驱动的基于事件的视觉中的突破,具有显着改善的人类机器人相互作用。事件摄像机在管理动态范围和运动模糊方面表现出色,无缝适应各种环境条件。本文提出的研究利用这项技术开发了能够解释手势进行精确机器人控制的直觉机器人指导系统。我们介绍了“ Eb Handgesture”数据集,这是一种与我们的网络“ Convrnn”结合使用的创新高分辨率手势数据集,以在解释任务中证明95.7%的值得称赞的精度,涵盖了不同照明场景中的六种手势类型。为了验证我们的框架,使用ARI机器人进行了现实生活实验,从而确认了在各种相互作用过程中训练有素的网络的有效性。这项研究代表了确保共享工作空间中更安全,更可靠,更有效的人类机器人协作的实质性飞跃。索引术语 - 基于现实的手势识别,机器人控制,手势数据集

事件摄像机使用异步时空 - ...
与常规摄像机相比,事件摄像机代表了神经形态成像技术的值得注意的进步,由于其独特的优势,研究人员引起了很大的关注。但是,事件摄像机容易受到显着水平的测量噪声,这可能会对依赖于事件流的算法的性能降低,例如感知和导航。在这项研究中,我们介绍了一种新颖的方法来降级事件流,目的是填写未能准确反映出真正的对数强度变化的事件。我们的方法着重于事件的异步性质和时空特性,最终导致了新型异步时空事件的发展神经网络(ASTEDNET)。该网络直接在事件流上运行,规避将事件流转换为图像帧等密集格式的需求,从而保留其固有的异步性质。借助图形编码和时间卷积网络的原理,我们结合了时空特征注意机制,以捕获事件之间的时间和空间相关性。这可以使原始流中每个活动事件像素的分类为代表真正的强度变化或噪声。在多个数据集上针对最先进方法进行的比较评估表明,我们所提出的算法在消除噪声方面具有显着的效率和鲁棒性,同时将有意义的事件信息保留在场景中。

基于视觉的自主降落和抗己型无人机的充电系统
基于无人机的系统的挑战之一是车载电池的容量有限。为了克服机载电池容量的限制,本文介绍了一种智能的决策系统,用于自动着陆和充电过程。该系统旨在充电排干电池并延长飞行持续时间。基于红外发光二极管(LED)检测和标记识别。在这项研究中精心设计和使用了一个具有二十个红外LED和八个条形码的新型着陆垫。着陆过程分为两个阶段。在第一阶段,由配备红外通滤波器的摄像机观察到LED,而在第二阶段中,两个像素摄像机观察到条形码。将无人机降落在适当的极性上,然后开始充电过程,这是一种基于OTSU阈值方法的基于层次视觉的自主着陆算法(HVALA)和高斯(LOOD)操作员的Laplacian。整个系统是通过一系列自动驾驶飞行设计和测试的。在着陆过程的最后阶段获得的实验结果证实了系统的可行性和鲁棒性,在该系统平均观察到4.4厘米的较小误差为4.4厘米,最大着陆时间为10秒。在本应用程序中可以接受此类错误,并导致较高的着陆成功率。


M.、Roy、A.、Nguyen、HV 和 Nguyen、TP (2023 年 5 月 30 日至 6 月 2 日)。用于微测辐射热计真空封装的晶圆级封盖技术。2023 IEEE
可见光摄像机能够使用波长范围从 0.4 到 0.7 µm 的电磁波记录适当照明的物体的图像。在波长超过 0.7 µm 的物体上成像非常有用,因为它可以揭示有关物体的更多信息并实现新的应用。然而,在更长的波长上成像需要配备特殊红外图像传感器和不同光学器件的摄像机 [1, 2, 3]。在众多类型的红外图像传感器和探测器技术中,有微测辐射热计,它实现了非制冷且价格实惠的热红外摄像机。这种热红外摄像机允许人们通过物体的辐射热(即通过普朗克辐射定律描述的红外辐射发射)获取物体的图像。微测辐射热计主要对长波红外 (LWIR) (8-14) µm 敏感,这与地球大气中的透明波段相吻合。与可见光摄像机一样,热红外摄像机在国防、交通、监控、消防、热成像和户外休闲方面具有许多应用和巨大的市场。许多新的应用领域都得益于微测辐射热计
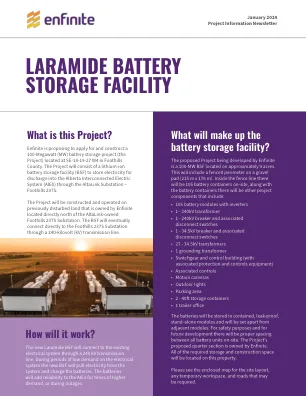
Laramide电池存储设施
Enfinite已采取措施管理和减轻设施设备以及周围区域的风险。该设施将被封闭在光线充足的围栏区域内。每个电池模块将通过红外摄像机和温度监控器/警报进行监控,以实时密切监视任何火灾,健康和安全风险。如果在电池网站触发警报,请立即通知项目经理,并通知当地应急响应提供商以实施应急响应计划。在现场持续使用这些热和运动摄像机将使Enfinite可以远程监视该项目并先发出可能出现的安全问题。

紧凑型红外辐射光谱追踪器 (c-FIRST)
许多跨学科科学研究都需要对野火进行遥感,包括野火对生态的影响。几十年来,这项研究一直受到空间分辨率不足和探测器在短波和中波红外波长处饱和的阻碍,而高温 (>800 K) 表面的光谱辐射最为显著。为了解决这个问题,我们正在开发一种紧凑型高动态范围 (HDR) 多光谱成像仪。紧凑型火灾红外辐射光谱跟踪器 (c-FIRST) 利用数字焦平面阵列 (DFPA)。DFPA 由最先进的高工作温度屏障红外探测器 (HOT-BIRD) 和数字读出集成电路 (D-ROIC) 混合而成,具有像素内数字计数器以防止电流饱和,从而提供动态范围 (>100 dB)。因此,DFPA 将能够对温度变化范围从 300 K 到 >1600 K(燃烧的火灾)的目标进行非饱和高分辨率成像和定量检索。凭借从 500 公里的标称轨道高度解析地球表面 50 米级热特征的分辨率,一次观测即可捕获野火的全部温度和面积以及冷背景,从而增加每个返回字节的科学内容。使用非饱和 FPA 是一种新颖的做法,它克服了以前高辐射值使 FPA 像素饱和(从而降低了科学内容)的问题,并展示了遥感方面的突破性能力。因此,c-FIRST 适用于量化野火排放,这对于确定其对全球生态系统的影响至关重要。 c-FIRST 的 FPA 采用 InAs/InAsSb HOT-BIRD 外延材料制作,像素间距为 20 m,探测器阵列为 1280x480 格式,并与模拟 DROIC 混合。DFPA 的 50% 截止点为 ~4.5um,在 140K 工作温度下,整个 QE 光谱范围内测得的外部 QE~50%。我们将积分时间固定在 6 毫秒,以便在以 150 Hz 帧速率观察正常 300K 背景场景时在 MWIR 波段获得良好的灵敏度。对于标准模拟 ROIC,探测器像素在目标温度 ~700 K 时很容易饱和。当 D-ROIC 在 16 位模式下运行时,我们可以将饱和温度显著提高到 ~1100 K。当 D-ROIC 在超 HDR 32 位模式下(28 万亿电子阱深度)运行时,即使对于 1600 K 目标,探测器也不会接近饱和。火灾遥感的一个关键指标是可探测的最小目标尺寸。c-FIRST 可将可探测火灾的最小尺寸提高一个数量级,这主要是由于非饱和探测器的空间分辨率比 GOES 上的高级基线成像仪等当前维修仪器更高,同时功率、尺寸和重量也更低。c-FIRST 空中飞行计划于 2024 年火灾季节进行仪器测试和验证。我们预计 c-FIRST 太空验证将基于 2026 年或之后的空间技术验证机会。