XiaoMi-AI文件搜索系统
World File Search System绝对距离
探索航空航天控制中强化学习的动态
▶作用:施加到电动机的电压(u)▶状态:到所需角度(∆ =θ -r)和当前角速度(ω=ω=θ)▶奖励:到所需角度的绝对绝对距离( - | | |Δ| ∆ | ∆ |)

重要过程说明了2025年2月8日版权...
最小传感器距离=单位距离最大感觉位移=单位距离如果感觉阵列为立方阵列:边缘具有单位距离。平面中的对角线具有距离SQR(2)。多维数据集中的对角线具有距离SQR(3)。在单位单元格中,单位距离为1。实际单位距离是绝对距离乘以常数1。大脑必须计算实际的单位距离和所有实际距离,以制定空间阵列模型。距离之间的关系表示传感器的几何形状,因为所有运动和距离都在质量中心周围成比例。与重力,内部运动和其他外力有关的扭矩和力矩之间的关系表示绝对距离。位置变化变化势能,这与高度直接相关,并使用质量中心,高度与感觉阵列的单位距离有关。

跟踪Modulo的明确范围之外...
摘要在单个光子激光雷(SPL)中,激光重复率设置了可以明确恢复的最大距离。常规SPL通过降低重复率来扩展此最大记录深度;但是,较慢的采集速度限制了接收到的光子的数量,这可能是不可能跟踪快速移动对象的。受到Modulo感测成功的启发,我们利用了典型轨迹的平滑度,以实现超出明确范围的远程跟踪。尽管SPL自然地获得了模量时间的测量时间,但它引入了几个挑战,包括随机抽样时间,多个噪声源和绝对距离不确定性 - 当前的模型传感文献无法解决这些挑战。因此,我们提出了一种直接在模量样品上运行的插值和denoising方法。我们基于变化的反射性降落性进一步消除了绝对距离。蒙特卡洛模拟考虑了实际条件下的逼真的轨迹,表明,如果适当地解开,我们的深度估算的归一化平方误差估计,相对于重复期会导致不模棱两可的激光雷达设置,我们的深度估计值降低了20 dB以上。
ADA 指南第 7 章 - 标志
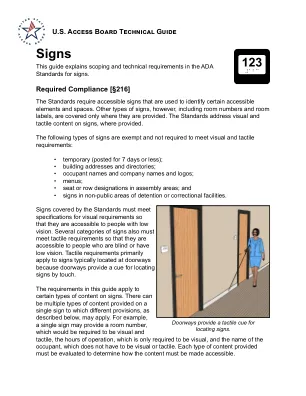
触觉字符的中心位置必须留出至少 18 英寸 x 18 英寸的净地板空间。净地板空间的这种放置方式为标志处提供了无障碍站立空间,以便通过触摸读取。该空间的高度不得超过 80 英寸。为了安全起见,该空间必须位于任何门摆弧线之外,以达到 45° 的开启位置。这实际上设定了触觉标志与外摆门之间的最小距离,但不是绝对距离。虽然净地板空间必须位于触觉字符的中心位置,但标志可以位于门摆之外的不同距离处。

基于振动的公共场所漏水检测系统...
管道振动是使用新开发的系统采集的,该系统由 10 个传感器组成,分为两条链。这些链连接到主计算机,以将采集的数据持续传输到配备大存储空间的云服务器,该云服务器能够记录长达 6 个月的连续数据流。然后使用第 4 段所述的 ML 算法对采集的数据进行阐述。实验活动在城市地区进行,传感系统应用于 135 Ø 毫米新的地下水聚乙烯管道。传感器放置在管道表面上,使用低声阻抗胶,彼此之间的距离如表 1 所示。距离显示为从传感器 11 开始的绝对间隙、与前一个传感器的相对间隙或与模拟泄漏的绝对距离。图 1 描绘了传感器部署的更全面图片,其中实线表示 2 个节点之间的电子连接。

增材制造前沿
与其预见和准备应对太空任务中可能出现的所有机器故障、事故和其他挑战,不如利用增材制造的灵活性进行“太空制造”(ISM),这似乎是合乎逻辑的。载人航天任务依赖于复杂的设备,其安全运行是一项巨大的挑战。考虑到载人登月和火星任务的绝对距离,从地球运送用于维修和更换丢失设备的备件将需要太多时间。由于设计灵活性高,并且能够直接从计算机辅助模型制造即用型组件,增材制造技术在这种情况下似乎极具吸引力。此外,还需要适当的技术来制造宇航员在月球和火星上长期居住的建筑栖息地以及材料/原料。将设备和材料送入太空的能力不仅非常有限且成本高昂,而且还引发了人们对地球环境问题的担忧。因此,并非所有材料都能从地球运送,人们正在设想利用原地资源的战略,即原地资源利用(ISRU)。对于复杂零件和设备的制造以及大型基础设施,需要开发适当的太空材料加工技术。