XiaoMi-AI文件搜索系统
World File Search System脊架

多架无人机的自适应人机交互
摘要:无人机系统 (UAS) 的进步为逐步提高智能和自主水平铺平了道路,支持新的操作模式,例如一对多 (OTM) 概念,其中单个操作员负责监控和协调多架无人机 (UAV) 的任务。本文介绍了支持 OTM 应用中自适应自动化的认知人机界面和交互 (CHMI 2) 的开发和评估。CHMI 2 系统包括一个神经生理传感器网络和基于机器学习的模型,用于推断用户认知状态,以及包含一组用于控制/显示功能和离散自主级别的转换逻辑的自适应引擎。在离线校准阶段,根据过去的表现和神经生理数据对用户认知状态的模型进行训练,随后在在线适应阶段使用这些模型来实时推断这些认知状态。为了研究 OTM 应用中自适应自动化,开发了一个涉及丛林火灾检测的场景,其中单个操作员负责指挥多个无人机平台在广阔区域内搜索和定位丛林火灾。我们介绍了开发的 UAS 模拟环境的架构和设计,以及各种人机界面 (HMI) 格式和功能,以通过人机在环 (HITL) 实验评估 CHMI 2 系统的可行性。随后将 CHMI 2 模块集成到模拟环境中,提供实现自适应自动化所需的感知、推理和适应能力。进行了 HITL 实验以验证 CHMI 2



力量架 HV4 系列
注意事项:1. 按照示意图正确安装系统,注意不要用单根电缆直接连接同一个模块的正负极。2. 安装电缆前,请确保所有断路器处于闭合状态。3. 系统启动前,需对电池系统进行自运行测试。

地毯保护 • 托盘架货架...
“A” 形框架手推车 . ... 41-47 器具带 . ... . ... . . . . . . . . . . . . . . . . . . . . . . . . . .20 品牌宣传. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4 黄铜挂锁. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 地毯保护罩. . . . . . . . . . . 31 地毯保护罩. . . . . . . . . . . . 31 铺有地毯的小推车. . . . . . . . . . . . . 2 纸箱. . . . . . . . . . . . . . . . 20 脚轮. . . . . . . . . . . . . .

海冰压力脊帆高度的高分辨率机载观测
摘要。压力脊影响海冰覆盖的质量、能量和动量预算,并对穿越冰封水域的运输造成障碍。量化脊特征对于了解海冰总量和改善高分辨率模型中海冰动力学的表示非常重要。在每年的北极冰桥行动 (OIB) 航空调查期间收集的多传感器测量数据为评估冬末的海冰提供了新的机会。我们提出了一种从高分辨率 OIB 数字测绘系统 (DMS) 可见光图像中得出脊帆高度的新方法。我们通过绘制西部和中部北极 12 个压力脊沿线的完整帆高分布来评估该方法的有效性。通过与同时发生的机载地形测绘仪 (ATM) 高程异常进行比较,可以证明该方法并评估 DMS 得出的帆高。帆高和高程异常的相关性为 0.81 或以上。平均而言,帆高平均值和最大值与 ATM 海拔高度的吻合度分别在 0.11 米和 0.49 米以内。在绘制的山脊中,帆高平均值范围为 0.99 至 2.16 米,而最大帆高范围为 2.1 至 4.8 米。DMS 沿山脊的采样率也高于同步的 ATM 数据。

电缆桥架布局 V2.pdf
您不希望大厅和走廊的天花板上悬挂任何东西,甚至墙壁中间也不悬挂任何东西。我们只能在天花板或地板旁边的墙上安装托盘或塑料管。是按照修改 #1(金属悬挂轨道)中的方式去做,还是按照调查中告诉我们的方式去做?

市售开放式架白皮书
The Microchip Website............................................................................................................................................... 16 Product Change Notification Service........................................................................................................................ 16 Customer支持............................................................................................................................................................................................................................................. Notice..................................................................................................................................................................16

公用事业规模的储能电池架
CAN 是一种双线(双绞线)双向串行总线通信方法,允许电子子系统连接在一起并在网络中交互(Zerynth 文档)。此通信标准有各种连接器和电缆选项。M12 连接器和电缆被视为标准接口,因为它具有广泛的产品组合、安装人员熟悉度和 IP 等级。产品包括带飞线的面板安装、以太网面板安装和设备侧的 PCB 安装。在电缆/插头侧,有螺纹版本以及推拉式版本,以实现更快的连接。直角方向有利于缩短突出部分,如果从侧面撞击,则不易被剪断。如果工厂包覆成型,M12 连接器可以选择集成屏蔽和电缆上的高级屏蔽技术。
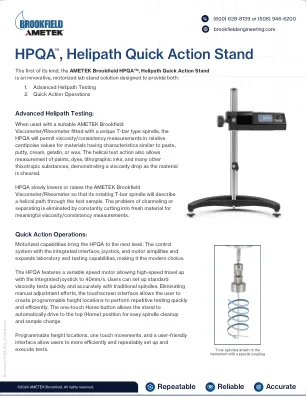
HPQA,Helipath快速动作架
HPQA具有可变的速度电机,可高速行驶,集成的操纵杆至40mm/s。用户可以通过传统的主轴快速准确地设置标准粘度测试。消除手动调整效果,触摸屏接口允许用户创建可编程的高度位置,以快速而有效地进行重复测试。单打主页按钮允许支架自动驾驶到顶部(家庭)位置,以便于纺锤清理和样品更改。