XiaoMi-AI文件搜索系统
World File Search System臂丛

有关智能控制系统的评论论文,以提高机器人臂的速度
新数字世界中创新的快速发展以及信息,通信和网络物理技术的不断增长已经修改了现代制造,尤其是在行业4.0的背景下[1]。许多制造行业都采用许多尖端技术。在制造业中获得吸引力的一项技术是机器人手臂操纵器。该技术的利用旨在提高效率和生产力。性能和生产的增加是由于机器人组的速度和精度提高了[2]。在过去的30年中,机器人在工业,医学,军事领域和农业中越来越广泛使用[3]。目前,对在农业中使用机器人和自动化技术的使用进行了许多研究,包括种植,喷涂,监测,播种,养育和收获是迈向农业工业化的重要步骤。自动收获机器人技术已成为数字农业最重要的关键部分之一[4]。用一贯的自动化过程代替耗时和劳动密集型的手动采摘任务将导致人类劳累的减少,最终提高了现场生产率。可以通过利用机器人收割来实现这一目标,该机器人收获涵盖了机器人臂,机制和软件系统。尽管如此,如果控制策略的设计不足,则可能导致农业生产损失。[5]。来自世界各地的研究人员已经对不同的蔬菜和水果进行机器人采摘进行了许多研究,例如番茄采摘机器人,草莓拾取机器人,西瓜拾取机器人和莴苣拾取机器人[6]。与采摘机形成鲜明对比的是,这些采摘机器人更加自动化和更聪明。他们已经完成了挑选目标的基本过程,使人们摆脱了繁重的劳动。尽管如此,我们需要智能控制和智能算法来加快机器人的臂,以高精度地收获农作物。本文详细概述了与收获操作器控制问题有关的过去和当前研究。本文的目的是了解控制系统的方法以及通过确定已采取的措施来提出创新控制方法来弥合本文已发表文献中观察到的知识差距的方法,从而将其分为三个主要部分。第一部分集中于农业收获机器人;第二部分是关于深度学习和视觉控制,第三部分是关于运动计划(运动计划)。概述了世界面临的几个挑战,包括COVID-19大流行,人口增长,气候变化和减少粮食生产,这是世界面临的几个挑战。在大流行期间,粮食生产的设施停止了生产,导致世界部分地区的恐慌。尽管令人担忧,但通过提供解决方案的科学技术进步可以减轻许多担忧,尤其是粮食不安全。人口增长进一步加剧了这种粮食不安全问题,在2050年需要将粮食生产增加一倍,以养活世界上100亿的人口。传感器技术,自动化和机器人技术在技术上都在发展[7]。随着智能制造的持续开发以及机器人的不断扩展应用,机器人在越来越复杂的环境中部署,机器人的性能要求变得越来越
校准高能暗物质搜索氙气后臂的闪烁和电离响应
免责声明本文件是作为由美国政府机构赞助的工作的帐户准备的。美国政府和劳伦斯·利弗莫尔国家安全,有限责任公司,或其任何雇员均不对任何信息,设备,产品或流程的准确性,完整性或有用性承担任何法律责任或责任,或承担任何法律责任或责任,或者代表其使用不会侵犯私有权利。以本文提及任何特定的商业产品,流程或服务,商标,制造商或其他方式不一定构成或暗示其认可,建议或受到美国政府或Lawrence Livermore National Security,LLC的认可。本文所表达的作者的观点和意见不一定陈述或反映美国政府或劳伦斯·利弗莫尔国家安全,有限责任公司的观点和观点,不得用于广告或产品代表目的。

带有Mako机器人臂辅助总膝关节置换术的陷阱
摘要:与手动总膝关节置换术相比,机器人臂辅助的总膝关节置换术(Ratka)最小化植入物比对的偏差可最大程度地使植入物的偏差在植入物位置上获得优异的精度。在这篇全面的评论中,我们介绍并分类了该程序的局限性和陷阱,我们还提供了避免每个限制的建议。主要的外科医生相关的局限性包括长时间的操作持续时间,检查点和销钉的插入松散,错误的注册和映射以及对骨切割过程中软组织的损害。与系统相关的问题包括由于振动,手术室的规格和电源的规格而导致的锯切中断,系统的高成本以及由于额外植入物而导致的每个操作的成本,无法使用系统的各种假体,各种无线连接,系统的组件之间的无线连接中断,该组件之间的六个关节设备之间的六个设备之间的无线连接。为了规避此手术程序中的潜在挑战,必须拥有足够的经验并接受全面的培训。在整个操作中保持对其他植入物的持续意识,并确定保存软组织的意义至关重要。在某些情况下,对系统及其固有的约束的深刻理解也可能是关键的。
实现极化输入的量子断层扫描...
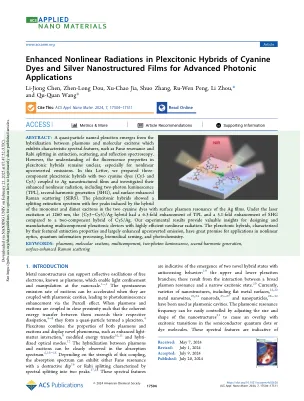
摘要:一个名为plexciton的准粒子来自等离子体和分子激子之间的杂交,这些杂交在灭绝,散射和反射光谱方面表现出特征的光谱特征,例如Fano共振和RABI分裂。然而,对丛杂种中荧光特性的理解尚不清楚,尤其是对于非线性上将的排放。在这封信中,我们准备了三个组成的丛杂种杂交体,该杂种与两种氰胺染料(CY3和CY5)耦合到AG纳米结构膜并研究了它们增强的非线性辐射,包括两光子发光(TPL),第二谐波(TPL),第二谐波生成(SHG)(SHG)和表面增强的Raman Raman Raman散射(Sersserssers)。丛杂种显示出分裂的灭绝频谱,其中五个峰与二聚体染料的杂种诱导的五峰,并带有Ag膜的表面等离子体共振。在1260 nm的激光激发下,(Cy3-cy5)/ag混合动力车的TPL增强了6.3倍,与Cy5/ag的两种组件混合体相比,SHG的增强率为5.1倍。我们的实验结果为设计和制造具有高效的非线性辐射设计和制造多组分丛设备提供了宝贵的见解。丛杂种,其特征在于其特征灭绝的特性和很大程度上增强的上流发射,对非线性光学,量子信息处理,生物医学感应和光化学的应用有很大的希望。关键字:等离子体,分子激子,多组分,两光子发光,第二谐波产生,表面增强的拉曼散射

颈背根的硬膜外电刺激恢复了瘫痪的猴子的自愿臂控制
图1。实验框架。(a)在左侧,行为实验平台的示意图。当动物执行机器人覆盖,掌握和拉动任务时,我们测量了施加到机器人接头,全LIMB运动学,肌电图(EMG)活性的3D力,来自手臂和手的八个肌肉,以及来自感觉运动区域的皮层内信号。实验方案的右,概念方案:(1)在控制计算机上运行的解码器确定了运动的尝试,(2)(2)将电脊髓刺激传递到适当的脊髓根。(3)刺激产生了我们在离线记录和分析的手臂和手动运动。(b)任务的示意图。猴子经过训练,可以抓住,掌握并拉出放置在机器人臂末端效应子上的目标对象。我们认为当目标空间阈值在拉动过程中越过时,我们认为运动完整。版权所有JemèreRuby。
控制中枢神经系统发育和疾病的大脑免疫系统
图2:B-1A细胞在发育过程中B-1A细胞的少突胶质细胞的发育控制机理,B细胞被CXCL13从血液中吸引,CXCL13是由脉络膜丛产生的,并被定位于边界区域,例如脉络膜丛和脑膜。这些B细胞将其性质变成B-1A细胞,产生天然抗体,促进OPC的生长并控制少突胶质细胞的成熟。

编号185用机器人臂香料开发自动水下车辆(AUV)
在海上开发业务中,包括海上石油和天然气场的开发,建设和维护以及探索离岸矿产资源,远程操作的车辆(ROV)已被用来探索海床,建造,检查和维护海底结构。由于最近的石油价格下跌和对环境影响的兴趣增加,并且由于自动驾驶水下汽车(AUV)技术的进步,越来越多的预计,通过与AUVS和CO 2的ROV操作自动化一部分,可以通过降低可增强的操作效率的运营时间来提高运行效率。AUV与ROV不同,不需要具有高级技能的操作员,并且他们的移动不受电线的限制。此外,ROV需要具有高级动态定位功能的支撑船,但可以使用更简单的支撑船进行操作。我们于2013年开始对AUV的研究和开发
免疫的概述和单臂荟萃分析 -trail及其心脏疾病的受体
心血管疾病是全球死亡的主要原因。在多种类型的心脏损害中发生的心肌细胞的丧失,例如缺血性损伤和压力超负荷引起的压力,由于其再生能力有限而减少心脏功能并促进重塑,从而进一步损害了心脏。心肌细胞死亡通过两种主要机制,即坏死和凋亡。凋亡是一种高度调节的细胞死亡形式,可以通过内在(线粒体)或外在(受体介导的)途径发生。外部凋亡是通过称为“死亡受体的肿瘤坏死受体(TNF)家族受体的子集发生的。”虽然某些死亡受体的配体在心脏中进行了广泛的研究,例如TNF-α,但实际上未研究。一种特征性不佳的心脏TNF相关配体是与TNF相关的凋亡诱导配体(TRAIL)。踪迹与两个诱导凋亡的受体结合,即死亡受体(DR)4和DR5。还有三个诱饵受体:诱饵受体(DCR)1,DCR2和骨蛋白蛋白蛋白蛋白蛋白酶(OPG)。由于其在转化的细胞类型中有选择性诱导凋亡的能力,因此在癌症领域进行了广泛的研究,但新兴的临床证据表明,TRAIL及其受体在心脏病理学中的作用。本文将强调我们目前对TRAIL及其受体在心脏正常和病理条件下的理解。
Adacel Polio 数据表
在 Adacel Polio 上市后使用过程中,自发报告了以下其他不良事件。由于这些事件是来自人数不确定的群体的自发报告,因此无法可靠地估计其发生频率或与疫苗暴露之间的因果关系。这些事件很少被报告。血液和淋巴系统疾病:淋巴结肿大免疫系统疾病:过敏反应,如荨麻疹、面部水肿和呼吸困难。神经系统疾病:抽搐、血管迷走神经性晕厥、格林-巴利综合征、面瘫、脊髓炎、臂丛神经炎、接种肢体短暂性感觉异常/感觉减退、头晕 肌肉骨骼和结缔组织疾病:接种肢体疼痛 胃肠道疾病:腹痛 全身疾病和注射部位情况:不适、苍白、注射部位硬结 据报道,在接种 Adacel Polio 疫苗后,肢体大面积肿胀可能从注射部位延伸至一个或两个关节以外,并经常伴有红斑,有时伴有水泡。大多数这些反应在接种疫苗后 48 小时内出现,平均 4 天内自发消退,没有后遗症。风险似乎取决于之前接种 dTpa/DTPa 疫苗的剂量,接种第 4 剂和第 5 剂后风险更大。 疑似不良反应报告