XiaoMi-AI文件搜索系统
World File Search System自动检测

自动检测和警报系统
摘要。在印度,有80%的死亡是由于事故造成的,以防止这种车辆到车辆技术。这种V2V技术不仅可以防止事故,而且可以检测到它们。此V2V是其的子集。v2v是车辆到车辆通信,在该通信中,车辆交换有关速度,位置和旅行方向的信息,从各个方向近距离靠近驾驶员的车辆对车辆的全面意识。当前系统既包括预防(通过振动传感器)和检测(通过Google Maps Integration)。在拟议的论文中解决了预防和检测。在预防方面,DSRC是用于通信的无线网络。V2V的操作范围为250m。这项技术在丘陵地区特别有用,在丘陵地区,驾驶员可能无法检测到盲点中的车辆。而不是DSRC,我们可以使用Zigbee或蓝牙进行通信。使用UV传感器检测到障碍物,并由蜂鸣器提醒;当它超出范围时,车辆会自动停止。在检测方面,这主要基于检测事故的加速度计。将使用GPS和GSM来实现事故位置的识别和创建以及消息和位置的发送。该系统的主要优点是成本效益,确保安全性,能够迅速挽救受害者的生命,有效的时间消耗的能力以及减少人为错误的可能性。

自动检测建筑点...
希腊雅典国立技术大学乡村与测量工程学院摄影测量实验室,电子邮箱:maltezosev@gmail.com;cioannid@survey.ntua.gr 第三委员会,第三工作组/2 关键词:激光雷达、点云、建筑物提取、扫描线、过滤、变化检测 摘要:本研究旨在自动检测建筑物点:(a)从激光雷达点云中使用简单的过滤技术来增强每个点的几何特性,以及(b)从使用立体方法半全局匹配 (SGM) 在高分辨率彩色红外 (CIR) 数字航空影像上应用密集图像匹配提取的点云。第一步,去除植被。在 LIDAR 点云中,首先使用法线,然后使用粗糙度值,实施并评估两种不同的方法:(1)建议的扫描线平滑滤波和阈值处理,以及(2)双边滤波和阈值处理。对于 CIR 点云的情况,出于相同目的,计算归一化差异植被指数 (NDVI) 的变化。之后,使用形态学算子提取裸地并将其从其余场景中移除,以保留建筑物点。使用现有正射影像作为参考,评估在希腊北部城市地区应用每种方法提取的建筑物的结果;此外,将结果与从两个商业软件中提取的相应分类建筑物进行比较。最后,为了验证达到最佳精度的提取建筑物点的实用性和功能性,在整个场景的子区域上指示性地执行细节级别 1 (LoD 1) 的 3D 模型和 3D 建筑物变化检测过程。

自动检测和表征紧密...
空间领域感知的一个基本方面是能够探测和描述目标卫星附近的物体。在地面光学望远镜监测 GEO 卫星的情况下,由于物体的暗淡以及大气模糊和光学系统的衍射极限对角分辨率的限制,这种“近距离物体”(CSO)问题变得具有挑战性。本文介绍了在 AMOS 进行的基于散斑干涉法的 CSO 实验,散斑干涉法是一类允许从一系列短曝光图像中恢复高空间频率信息的技术。散斑干涉法不需要自适应光学 (AO),因此在光线不足以进行被动 AO 且操作激光导星不切实际的情况下仍然有用。
简单的性能特征自动检测...
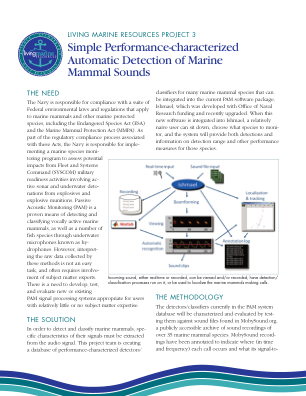
海军负责遵守一系列适用于海洋哺乳动物和其他海洋保护物种的联邦环境法律和法规,包括《濒危物种法》(ESA)和《海洋哺乳动物保护法》(MMPA)。作为与这些法案相关的监管合规流程的一部分,海军负责实施海洋物种监测计划,以评估舰队和系统司令部(SYSCOM)军事准备活动的潜在影响,这些活动涉及主动声纳和爆炸物和爆炸弹药的水下爆炸。被动声学监测(PAM)是一种行之有效的方法,可通过水下麦克风(称为水听器)检测和分类发声活跃的海洋哺乳动物以及多种鱼类。然而,解释通过这些方法收集的原始数据并非易事,通常需要主题专家的参与。需要开发、测试和评估适合具有相对较少或没有主题专业知识的用户的新的或现有的 PAM 信号处理系统。
自动检测冠状动脉疾病、心肌病……
Jahmunah, V.、Ng, E. Y. K.、San, T. R. 和 Acharya, U. R. (2021)。使用带有 ECG 信号的 GaborCNN 模型自动检测冠状动脉疾病、心肌梗死和充血性心力衰竭。计算机在生物学和医学中,134,104457‑。https://dx.doi.org/10.1016/j.compbiomed.2021.104457

使用多...自动检测建筑物变化
关键词:建筑物变化检测,机载 LiDAR 数据,香农熵 摘要:建筑物变化的自动检测是城市区域监测、城市规划和数据库更新的重要过程。在这种情况下,从多时相机载 LiDAR 扫描中获取的 3D 信息是一种有效的替代方法。尽管文献中已经有一些研究,但建筑物和非建筑物中变化区域的分离仍然是一个挑战。为此,提出了一种新的建筑物变化检测方法,其主要贡献是使用高度熵概念来识别建筑物变化区域。实验采用了 2012 年和 2014 年的多时相机载 LiDAR 数据,平均密度约为 5 点/平方米。定性和定量分析表明,所提出的方法在建筑物变化检测方面具有很强的稳定性,能够识别微小变化(大于 20 平方米)。总体而言,变化检测方法的平均完整性和正确性分别约为 97% 和 71%。

自动检测,识别和计数深...
太平洋中的深海纹状会具有强大的商业,文化和娱乐价值,尤其是鲷鱼(Lutjanidae),这些价值(Lutjanidae)构成了大部分捕捞量。然而,由于数据的稀缺,管理这些遗迹是具有挑战性的。立体声诱饵的远程水下视频站(BRUV)可以提供有关鱼类股票的有价值的定量信息,但是手动处理大量视频是耗时的,有时甚至是不现实的。为了解决这个问题,我们使用了基于区域的卷积神经网络(更快的R-CNN),这是一种深度学习体系结构来自动检测,识别和计算BRUV中的深水鲷鱼。视频是在新喀里多尼亚(南皮林)收集的,深度为47至552 m。使用在6,364张图像中观察到的11个深水鲷鱼物种中的12,100个注释的数据集,我们为具有舒适注释的6种物种获得了良好的模型性能(F-Measures> 0.7,最高0.87)。视频中最大丰度的自动和手动估计之间的相关性很高(0.72 - 0.9),但较快的R-CNN显示出低估的偏见。一种半自动协议,我们的模型在处理BRUV镜头时支持手动观察者,改善了性能,与手动计数的相关性为0.96,对于某些关键物种,则具有0.96的相关性和完美的匹配(r = 1)。此模型已经可以帮助手动观察者半自动地处理BRUVS录像,并且当更多培训数据可用以降低假否定率时,肯定会改善。这项研究进一步表明,在海洋科学中使用人工智能是进步的,但对未来有必要。

ADABTS /自动检测异常行为和...
发电厂等民用设施通常位于广阔而偏远的地区。未来,小型分布式设施的数量将会增加,这是欧洲新环境政策的直接结果,旨在提高社会对气候变化的适应力。然而,对分散资产的保护将很难实现,需要那些管理者负担得起的便携式安全系统。BASYLIS 项目旨在通过开发一种低成本的智能传感平台来解决这些问题,该平台可以自动有效地检测复杂环境中的一系列安全威胁。广泛区域早期威胁检测的主要障碍有两种类型:功能性(例如误报率)和道德性(例如隐私)。这两个问题都加剧了

光电自动检测及高精度系统...
摘要。本文介绍了可见光和红外频段数字视频处理技术在空中物体实时自动检测和精确跟踪方面的发展成果。开发了基于空中物体实时自动检测和精确跟踪的算法和软件。对算法进行了测试并评估了其性能。通过测量按顺序处理每帧所花费的时间来评估算法的性能。测试结果发现,在执行现场可编程门阵列 (FPGA) 算法时,处理帧所花费的时间与物体配置、帧填充和背景特征无关。当算法在 FPGA 上以 1920x1080 的帧大小执行时,其速度比在个人计算机 (PC) 上的执行速度快 20 倍以上。