XiaoMi-AI文件搜索系统
World File Search System自平衡

两轮自驾机器人的开发与原型设计
摘要:移动机器人技术是机器人技术的一个分支,在该分支中,自平衡机器人类别尤其令人感兴趣,因为这些机器人有望像人类一样在困难的地形上行走,并可用作研究自主控制系统的平台。本文旨在总结两轮自平衡机器人的发展,并以此作为案例研究,展示计算机控制系统在物理系统中的应用。互补滤波器与三轴陀螺仪和加速度计一起使用,以精确测量两轮机器人的旋转,并将数据提供给比例-积分-微分 (PID) 程序,该程序相应地控制电机的功率,以控制其倾斜并实现自平衡。简而言之,机器人设法在小倾斜角度范围内实现自平衡,但是,设计缺陷(例如传感器在较大倾斜角度下脱落)会导致较大倾斜角度下的不稳定。在未来的工作中,可以采用更复杂的控制算法,并可以彻底探索不同机器人构造的影响。
采用 PITSCO TETRIX PRIME 和 MYRIO 技术设计自平衡机器人的模糊 PID 控制器
1.3.2.空间................................................................................................................................ 2
Labwit | Blanc Labo
Quin Drive 自平衡驱动系统创新的 Quin 驱动系统确保平稳可靠的轨道振动运动,速度在 30-300rpm 之间,即使振动平台不平衡或负载最大。为实现最大化的 ������������ ���� ���� ������������ ���������� ���������� ���������� 传输速率,振动直径可在 12.5mm、25mm 和 50mm 之间轻松调节。长寿命无刷电机提供一致且无振动的振动运动,免维护且低热量排放。
危险货物专家组 (DGP) 工作组会议 (DGP-WG/24)
就本特别规定而言,车辆是指用于运载一人或多人或货物的自推进式设备。此类车辆包括汽车、摩托车、踏板车、三轮和四轮车辆或摩托车、卡车、机车、自行车(带马达的脚踏车)和其他此类车辆(例如自平衡车或未配备至少一个座位的车辆)、轮椅、草坪拖拉机、自推进式农业和建筑设备、船只和飞机。当车辆在包装中运输时,车辆的某些部件(电池除外)可以从车架上拆下,以便装入包装中。
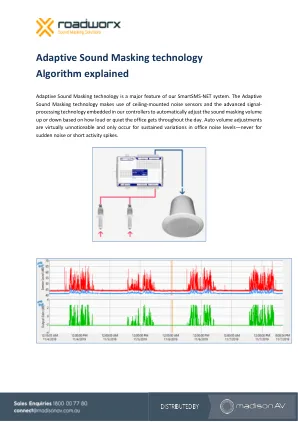
自适应声音掩蔽技术算法解释
在幕后,自适应声音掩蔽系统算法非常复杂。它提供了很大的灵活性,可以避免“动态”声音掩蔽系统的许多潜在缺陷。无反馈、自平衡系统:自适应声音掩蔽技术每 15 秒进行一次调整。该算法将测量该期间的峰值噪声水平 (L10%),并将其与背景噪声水平 (L95%) 进行比较。当这两个值之间的差距很小时,这意味着空间很安静,算法将默认使用 0.5 dB 的步长略微降低增益。当峰值和背景之间的差距增加时,这意味着空间中的活动更多,因此系统将略微增加声音掩蔽增益。几分钟后,这将倾向于增加由自然背景(活动 + 通风)和声音掩蔽组成的整体背景噪声水平。背景噪声水平 (L95%) 的增加将因此减少峰值和背景之间的差距,并且掩蔽噪声增加将停止。结果是系统不会自我反馈,在任何条件下都能自我平衡。对背景水平变化做出适当反应:适当的声音掩蔽系统应该对语音噪音做出反应,但当建筑物中的自然背景噪音水平增加时(通风增加、交通噪音增加),不应增加。为了实现这一目标,自适应声音掩蔽系统有一个“语音过滤器”,一个 200 到 3000Hz 之间的带通滤波器,用于关注人声。