XiaoMi-AI文件搜索系统
World File Search System致盲

Robert(Rupert)Wu
逆问题在许多领域都普遍存在,在医学成像[20,26],计算摄影[28,38]和地球物理学中的地震成像等领域具有重大应用[19,45]。尤其是,反问题的目的是从损坏的测量y中恢复原始信号x,这是由正向操作/测量aψ(·)生成的。逆问题通常根据ψ的可用性分为两个主要类别:非盲和盲逆问题。非盲逆问题已知已知ψ。相比之下,当ψ是未知的,需要同时提出ψ和x时,会出现盲目反对问题,这会带来更大的挑战。逆问题本质上是不适合的,通常很大程度上依赖数据先验P(X)进行准确的计算。重新说,扩散模型(DMS)已成为解决反问题的功能工具,因为它们的重新捕获复杂数据分布p(x)[9,10,13,34]。一种直接的方法来利用DMS解决反问题,涉及培训一个有条件的DM,通过监督学习直接估计后p(x | y)。但是,此方法可以是构成密集的,因为它需要为每个不同的测量操作员A单独训练DMS。为了克服这一局限性,最近的工作集中在利用预先训练的,未条件的DMS来估计先前的p(x),从而绕开了对其他模型训练的需求。在这种方法中,DMS提供的先前的P(X)与可能性P(Y | X)结合起来,以在反问题中的后验分布中采样。这些方法依赖于近似可能的项p(y | x),因为它在分析上是棘手的[9,34]。尽管如此,文献中提出的大多数逆问题解决者严格限于已知和固定测量算子Aψ的情况[9,34]。为了解决这个问题,我们提出了CL-DPS,这是一种基于C型收入来通过D iffusion p osterior s放大来解决盲逆问题的方法。具体来说,在CL-DPS中,首先使用修改版的Moco [16](一种对比度学习(CL)技术)对辅助深神经网络(DNN)进行训练。这种辅助DNN的作用是估计可能性p(y | x)的可能性,而不知道测量值Aψ。然后,在解决反问题的过程中,我们使用此辅助DNN进行推断以估计P(Y | X),然后将其用于调整扩散过程的反向路径。为了进一步提高辅助DNN在估计p(y | x)方面的准确性,我们引入了一种新颖的在推理阶段,将图像分为斑块。为了评估Cl-DPS的有效性,我们进行了Ex-

remus 300m - C51 系统支持 - HII
通过增加模块化,REMUS 300 可以根据不同的任务进行重新配置,从 107 磅的远征配置到 155 磅的长续航配置。REMUS 300 有 1.5、3.0 或 4.5 kWh 锂离子电池部分可供选择,续航时间可达 10、20 或 30 小时。盲配端盖允许在任务期间进行现场电池更换。
USDA_AMS_BIOENGINEERERED食品标签注释_7_3_18
•不要用诸如Halligan bar之类的工具盲目地穿过引擎盖,以便进入。此策略构成了严重的冲击危害。•进攻攻击:建议在存在暴露或不涉及高压电池的情况下进行。•防御性攻击:建议如果涉及高压电池并且不存在暴露。由于难以通过灭火剂到达电池内的燃烧电池,因此事件指挥官可以选择允许其燃烧
使用多种策略来处理互动事件和缺失值的研究。
治疗政策盲目地采取任何结果,无论冰的原因是什么都不是一个好策略。如果ICES之后的结果与研究目标保持一致,则该ICE应包括在感兴趣的治疗方案中。例如,感兴趣的治疗方法是随机治疗,并在协议中允许其他救援药物。然后,使用协议定义的救援中介不是冰(即不是偏离感兴趣的治疗)。

通过快速扩散反演
基于预训练扩散模型的图像恢复(IR)方法已显示出最先进的性能。但是,它们具有两个基本局限性:1)他们经常假设降解操作员是完全知道的,并且2)它们改变了扩散抽样过程,这可能会导致不在数据歧管上的恢复图像。为了解决这些问题,我们通过快速扩散反转(Bird)提出了盲图恢复(Bird),一种盲IR方法,该方法共同优化了降级模型参数和恢复的图像。为了确保恢复的图像位于数据歧管上,我们在预训练的扩散模型上提出了一种新颖的采样技术。我们方法中的一个关键想法不是修改反向采样,即。e。,一旦取样初始噪声,就不要改变所有中间潜在的潜在。这最终等效于将IR任务作为输入噪声空间中的优化问题。此外,为了减轻与完全展开的扩散模型相关的计算成本,我们利用这些模型的固有功能使用大的时间步骤在正向扩散过程中跳过。我们在几个图像恢复任务上实验验证鸟类,并表明它达到了最先进的表现。项目页面:https://hamadichihaoui.github.io/bird。

受中脑启发的稳健变化检测循环神经网络模型
我们提出了一种受生物启发的循环神经网络 (RNN),它可以有效检测自然图像中的变化。该模型具有稀疏拓扑连接 (st-RNN),与“中脑注意网络”的电路架构紧密相关。我们将 st-RNN 部署到一个具有挑战性的变化视盲任务中,该任务必须在一系列不连续的图像中检测变化。与传统 RNN 相比,st-RNN 的学习速度提高了 9 倍,并且以减少 15 倍的连接实现了最佳性能。低维动力学分析揭示了假定的电路机制,包括全局抑制 (GI) 基序对成功变化检测的关键作用。该模型再现了关键的实验现象,包括中脑神经元对动态刺激的敏感性、刺激竞争的神经特征以及中脑微刺激的标志性行为效应。最后,该模型在变化盲视实验中准确预测了人类注视点,超越了最先进的基于显着性的方法。st-RNN 提供了一种新颖的深度学习模型,用于将变化检测背后的神经计算与心理物理机制联系起来。

利用经典的反卷积和零照片图像恢复中的特征提取
非盲反卷积的目的是从鉴定获得的内核中恢复其模糊的图像。iS iSTING TEEP神经体系结构通常是基于大型地面真相图像的大型数据集建立的,并接受了监督训练。并不总是可用的,尤其是针对生物化应用,敏锐的高质量地面真相图像并不总是可用的。这严重阻碍了当前方法在实践中的适用性。在本文中,我们提出了一种新型的非盲卷曲方法,该方法利用了深度学习和经典迭代反卷积算法的力量。我们的方法结合了一个预先训练的网络,从输入图像中提取深度特征以及Itera的Richardson-Lucy反卷积步骤。随后,采用零射击优化过程来集成反浏览特征,从而产生高质量的重建图像。通过使用经典的迭代反卷积方法进行初步重构,我们可以有效地利用较小的网络来产生最终图像,从而加速重建,同时减少需求量,以减少有价值的计算资源。我们的方法证明了各种现实世界应用程序中的显着改进。
汽车道路技能测试说明可能...
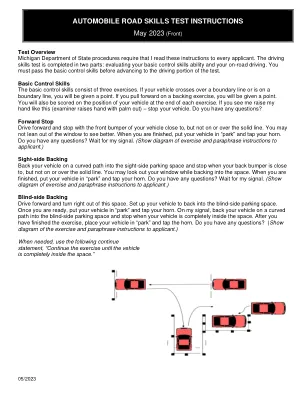
测试概述密歇根州州程序要求我向每个申请人阅读这些说明。驾驶技能测试分为两个部分:评估您的基本控制技能能力和公路驾驶。您必须通过基本控制技能,然后才能前进到测试的驾驶部分。基本控制技能基本控制技能由三个练习组成。如果您的车辆越过边界线或在边界线上,您将获得一个点。如果您向前进行衬托练习,将为您提供一个观点。您还将在每个练习结束时在车辆的位置上进行评分。如果您看到我这样的举手(考官用手掌伸出手) - 停止车辆。您有任何疑问吗?向前驱动前向前驱动,并在车辆的前保险杠上停止,但在实线上或距离上没有。您可能不会倾斜窗户看得更好。完成后,将车辆放在“公园”中,然后敲打号角。您有任何疑问吗?等待我的信号。(向申请人进行练习和解释指令的图表。)视线侧向弯曲的路径回到视线停车位,然后在后保险杠靠近(但不在坚固的线上)时停止。您可以在返回空间时向外看窗口。完成后,将车辆放在“公园”中,然后敲打号角。您有任何疑问吗?等待我的信号。盲侧背倾向向前驱动,然后向右转出这个空间。(向申请人进行练习和解释指令的图表。)设置您的车辆以返回盲侧停车位。准备就绪后,将车辆放入“公园”中,然后敲打喇叭。在我的信号上,将车辆靠在弯曲的路径上,进入盲侧停车位,并在车辆完全在空间内时停止。完成练习后,将车辆放在“公园”中,然后点击喇叭。您有任何疑问吗?(练习图和向申请人的解释说明的图表。)在需要时,请使用以下继续陈述:“继续练习,直到车辆完全在空间内为止。”

第二届智能传感器、信号处理和通信技术进步国际会议(ICASSCT-2024)日期和时间 22 – 23 日
ICASSCT 2024 会议的主要目标是推动传感器、信号处理和通信领域各方面的创新。会议遵循广泛的盲审流程,选出最佳论文进行演讲,其中包括专门为推进技术、系统和基础设施而设计的技术论文、教程、研讨会和行业会议。会议旨在从通信和信息理论到使用信号处理技术实现、评估和改进实际通信系统的性能。