XiaoMi-AI文件搜索系统
World File Search System负电流

模块 3 逆变器将直流电源转换为... 的设备
其中 RL 为阻性负载,V s /2 为电压源,S 1 和 S 2 为两个开关,i 0 为电流。其中每个开关并联连接到二极管 D 1 和 D 2。上图中,开关 S 1 和 S 2 为自换向开关。电压为正电流为负时,开关 S 1 导通;电压为负电流为负时,开关 S 2 导通。电压为正电流为负时,二极管 D 1 导通;电压为负电流为正时,二极管 D 2 导通。情况 1(当开关 S 1 处于 ON 状态且 S 2 处于 OFF 状态时):当开关 S 1 在 0 到 T/2 的时间段内处于 ON 状态时,二极管 D 1 和 D 2 处于反向偏置状态,而 S 2 开关处于 OFF 状态。应用 KVL(基尔霍夫电压定律)

IS 2309 (1989): 建筑物和相关结构防雷实用规范
这是雷云中带电细胞放电到地面的闪电部分。这次回击中的电流范围从大约 2 000 A 到大约 200 000 A,其值分布是自然界中经常出现的形式,称为“对数/正态”分布。因此: 1% 的闪电超过 200 000 A 10% “” “ 80 000 A 50% “” “ 28 000 A 90% u” ,.8 000 A 99% “” “ 3 000 A 大多数地闪中的电流来自雷云中带负电的细胞,因此闪电电流是从云到地面的负电流;较少见的是,来自云正极部分的闪电也会出现。然而,对于任一极性,电流都是单向的,负闪光的上升时间小于 10 p8(但正闪光的上升时间要长得多),然后衰减到 100 秒内简单的单次击打的低值。或 leis。一些闪光包含两个或多个击打,这些击打单独符合单次击打的描述,但间隔时间可能为 50 毫秒至 100 毫秒。因此,具有超过 10 次击打的罕见多击打闪光可能持续长达 1 秒。
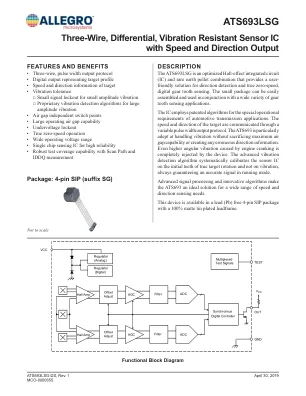
ATS693LSG - Allegro MicroSystems
1 典型值为 T A = 25°C 和 V CC = 12 V。在规定的最大和最小限度内,单个单元的性能可能有所不同。2 必须根据功耗和结温调整最大电压;请参阅功率降额部分。3 负电流定义为从指定设备端子流出(源自)的常规电流。4 超过钳位电压的持续电压可能会对 IC 造成永久性损坏。5 脉冲持续时间在 V PULLUP / 2 的阈值处测量。6 工作频率(反向旋转)和工作频率(无方向脉冲)的最大值由输出脉冲的令人满意的分离决定:V OUT(HIGH) 为 t w(FWD)(最小值)。如果客户能够解决较短的高状态持续时间,则最大 f FWD 、f REV 和 f ND 可能会增加。7 如果在信号变化事件期间或之后未保持最小信号相位分离,则输出可能会消隐或出现无方向脉冲。通电期间的信号变化事件可能会增加获得正确方向脉冲所需的边沿数量。8 通电频率 ≤ 200 Hz。更高的通电频率可能需要更多的输入磁循环,直到实现定向输出脉冲。
充电策略对锂聚合物电池容量的影响
2020年8月21日收到;以修订的表格收到2020年10月27日; 2020年10月30日接受;自锂离子电池发明以来,在线在线摘要,充电策略已获得了多年来的认可和研究。在本文中,在各种操作和充电载荷期间,通过三种广泛使用的工具监视了带有锂聚合物电池的笔记本电脑。获得了几个钥匙值,以评估电池周期,充电百分比和排放深度之间的相关性。最终结果表明,应避免使用设备的大量放电和连续的操作,尽管高负载任务需要连接AC充电器。确保电池保持在安全温度和充电范围内可以延长细胞寿命和状态,并防止电池内部的锂沉积物。版权所有©2020国际能源与环境基金会 - 保留所有权利。关键字:锂;电池;细胞;国防部释放;周期;存款;笔记本电脑;容量;聚合物。1。简介锂离子电池是每种现代应用的强大产品。它们用于微电子,例如智能手机,笔记本电脑,相机,警报和电动汽车,基本上需要电池。由Akira Yoshino开发的,根据Goodenough的团队研究[1],它们很快就在储能中占主导地位。研究人员大规模尝试降低成本并使其安全性[2]之后,索尼公司发布了第一个大型商业产品,因为高可易燃性,氧化和低充电周期。它们由铜阳极和铝阴极(后来在氧化锂上)组成,用液体电解质分离。工作原理很简单,如图1。锂离子的运动在阳极中产生自由电子,因此在阳性收集器处产生电荷。然后电流将负载流到负电流收集器。分离器阻止电池内的电子流[3]。从那时起,它们的演变就巨大[4,5],测试不同的元素,以确保能量密度和成本节省[6]。2。锂聚合物电池即使锂离子电池足够,也需要提高电池寿命和能量密度将研究转向另一种形式的锂离子电池:锂聚合物或Li-Po电池。这种电池
CD-2021-12 – 修订版 (LDV, LDT) 主题
• 车辆说明书应明确说明如何将车辆置于测功机模式(见下文)、如何将车辆置于空档、所需的电流钳数量以及如何安装它们以及如何读取电压。制造商必须包括测试车辆独有的任何特殊说明。这可能包括如何使用历史上称为“钥匙”的东西、如何“启动”车辆以及如何使车辆进入“休眠”状态。任何可能干扰测试的项目,如车门打开、引擎盖打开或安全带解开时车辆自动禁用,都应详细说明和强调,这些项目无法通过测功机模式或其他方式关闭。 • 车辆说明书应包括在 MCT 的两个恒速部分上实现的预期时间和距离。如果没有提供这些值,EPA 可能会使用 SAE J1634-12 中的公式为测试中期恒速循环 (CSC M ) 和测试结束时恒速循环 (CSC E ) 设置预期距离。 • 车辆必须有 CD-16-03 中所述的用于底盘测功机测试的固定装置。 • EPA 必须使用 EPA 自己的电流钳进行电流测量。 • 车辆应有清晰标记的电流钳连接位置和电压抽头(如果使用电压抽头)。车辆说明应包括安全安装车辆电流钳的详细说明。制造商必须指明电流流动的方向以及他们希望如何安装电流钳。EPA 实验室现在使用电流惯例,即负电流流出电池(放电)和正电流流入电池(充电)。 • EPA 更喜欢在电压抽头上使用 Pomona #6383-02 连接(通常称为“带护套的香蕉插头”)。如果由于技术原因您无法安装这种类型的连接,请通知您的认证工程师。 • 不提供电压抽头并需要 CAN 数据采集来测量电压的车辆可能会导致测试数据计算延迟。制造商应在预期结果时间中额外预留最多一周的时间。如果制造商可以提供包含参数信息的 .dbc 文件,EPA 能够使用其测试单元控制器读取 CAN 消息。如果制造商将提供第三方数据记录器,则他们必须提供电池电压、车速和时间对齐数据,然后才能提交给实验室进行处理。• 如果您的车辆需要四个以上的电流钳,请在测试前告知您的认证工程师。在这些情况下,制造商还应提供有关如何在测试数据采集中使用不同电流钳的详细说明,例如加法、减法等。• 如果需要起重机来安装电流钳或电压接头,请在测试前告知您的认证工程师。请告知是否需要任何特殊工具

应用说明 23:
应用说明 23:Innovate 的“直接数字”宽带技术实现的发动机控制策略摘要 氧气传感器是当今大多数内燃机的关键部件。Innovate 的“直接数字”技术使新一代氧气传感器比目前最好的宽带氧气传感器更快、更准确、更可靠、成本更低。这反过来又使发动机控制的新策略成为可能。虽然 Innovate 技术最初的商业认可是在性能和赛车市场,但最大的收益将在 OE 市场实现,工厂原装 ECU 可以设计和编程以利用直接数字技术。背景:氧化锆氧气传感器简史 自 20 世纪 70 年代中期以来,氧化锆传感器已在量产汽车中使用。第一批传感器是带有 1 或 2 根电线的“非加热套管”设计。20 世纪 80 年代初引入了“加热套管”设计,这种设计升温更快,并且有 3 或 4 根电线。4 线“平面”传感器于 20 世纪 90 年代末开始使用,现在占所有新平台的 50% 以上,部分原因是成本低且可靠性高。“宽带”5 线传感器(加热、平面、双电池)是最新的,是高性能、直接喷射、分层充电、灵活燃料、ULEV 和其他要求苛刻的应用所必需的。减缓宽带传感器采用的因素包括高制造成本和可靠性问题。尽管直接数字控制方法最初是针对宽带氧气传感器开发的,但最大的突破或许在于它能够实现新一代传感器,该传感器结合了 4 线平面传感器的低成本和高可靠性,同时匹配精度范围,并超过当前最佳宽带传感器的响应能力。该技术美国专利 #6,978,655,标题为“用于测量气体氧气浓度的系统、装置和方法”,详细介绍了以下总结的发明。凭借创新的测量原理,单个 Nernst 电池可以同时用作泵和参考电池。直接数字不使用常规 PID(比例-积分-微分)反馈机制来控制宽带传感器。相反,泵电流为正,直到参考显示 < Lambda 1。然后泵电流的极性反转,直到参考显示 > Lambda 1。这是通过一个小的滞后完成的。频率在 Lambda 1 处达到最大值。由于这样,测量室中的测量气体在化学计量附近以 300-800 Hz 的频率振荡。振荡频率取决于恒定(但极性变化)的泵电流、磁滞、传感器本身和 Lambda。这基本上是一个 2 点调节器,或者用数字电子术语来说,是 delta-sigma 模拟数字转换器的工作原理,只是这里测量的模拟值直接是废气。该振荡的占空比 PWM 用 (t1 - t2) / (t2 + t2) 计算,因此范围为 +/- 1.0。t1 是泵电流正极性的持续时间,t2 是负电流极性的持续时间(均以 16 位精度测量)。使用 PWMair(空气中的占空比),可以直接用 PWM/PWMair 计算泵单元的 O2 流量,因此可以从中计算 Lambda。由于传感器仅用于恒定且相对较高的 Ip,但极性会发生变化,因此 PWM 与 O2 流量完全呈线性关系,并且在标准化为 PWMair 后与特定传感器的 Lambda/Ip 曲线无关。
应用说明 23:
应用说明 23:Innovate 的“直接数字”宽带技术实现的发动机控制策略 摘要 氧传感器是当今大多数内燃机的关键部件。Innovate 的“直接数字”技术实现了新一代氧传感器,它们比目前最好的宽带氧传感器更快、更准确、更可靠、成本更低。这反过来又实现了发动机控制的新策略。虽然 Innovate 技术最初的商业认可是在性能和赛车市场,但最大的收益将是在 OE 市场,在该市场中,可以设计和编程工厂原始 ECU 以利用直接数字技术。背景:氧化锆氧传感器简史 自 20 世纪 70 年代中期以来,氧化锆传感器就已在量产汽车中使用。第一批传感器是带有 1 或 2 根电线的“非加热顶针”设计。80 年代初引入了“加热顶针”设计,该设计升温更快,并有 3 或 4 根电线。 4 线“平面”传感器于 90 年代末开始使用,目前占所有新平台的 50% 以上,部分原因是成本低且可靠性高。“宽带”5 线传感器(加热、平面、双电池)是最新的,是高性能、直喷、分层充电、灵活燃料、ULEV 和其他要求苛刻的应用所必需的。减缓宽带传感器采用的因素包括高制造成本和可靠性问题。虽然直接数字控制方法最初是为宽带氧气传感器开发的,但最大的突破可能是它实现了新一代传感器,该传感器结合了 4 线平面传感器的低成本和高可靠性,同时匹配精度范围,并超过了当前最佳宽带传感器的响应能力。该技术美国专利 #6,978,655,标题为“用于测量气体氧气浓度的系统、装置和方法”,详细介绍了以下总结的发明。凭借创新测量原理,单个 Nernst 电池可以同时用作泵和参考电池。Direct Digital 不使用常规 PID(比例积分微分)反馈机制来控制宽带传感器。相反,泵电流为正,直到参考显示 < Lambda 1。然后泵电流的极性反转,直到参考显示 > Lambda 1。这是通过一个小的滞后完成的。这样,测量室中的测量气体在化学计量附近以 300-800 Hz 振荡。振荡频率取决于恒定(但极性变化)的泵电流、滞后、传感器本身和 Lambda。频率在 Lambda 1 处达到最大值。这基本上是一个 2 点调节器,或者用数字电子术语来说,是 delta-sigma 模拟到数字转换器的工作原理,除了这里测量的模拟值直接是废气。该振荡的占空比 PWM 用 (t1 - t2) / (t2 + t2) 计算,因此范围为 +/- 1.0。t1 是泵电流正极性的持续时间,t2 是负电流极性的持续时间(均以 16 位精度测量)。使用 PWMair(空气中的占空比),可以直接用 PWM / PWMair 计算泵单元的 O2 流速,因此可以从中计算 Lambda。由于传感器仅用于恒定且相对较高的 Ip,但极性变化,因此 PWM 与 O2 流量完全线性,并且在标准化为 PWMair 后与特定传感器的 Lambda/Ip 曲线无关。由于