XiaoMi-AI文件搜索系统
World File Search System负责
将人权纳入负责投资:
INTRODUCTION INTRODUCTION..................................................................................................................................... ..................................................................................................................................... 3 3
钻石负责和道德采购政策
c。童工; d。其他严重的侵犯人权和滥用行为,例如广泛的性暴力; e。战争罪或其他严重违反国际人道主义法,危害人类或种族灭绝罪; f。通过提取,运输,贸易,处理或出口钻石向非国家武装团体提供任何直接或间接的支持。通过提取,运输,贸易,处理或出口钻石向非国家武装群体提供“直接或间接支持”,包括但不限于从中购买钻石,向非国家武装团体或其附属机构提供后勤援助或提供物流援助或设备的付款或其他人:i:i:i。非法控制矿场或以其他方式控制运输路线,交易钻石的点以及供应链中的上游演员;和/或

负责秋天ƒ-RDO设备
×T&C适用。 促销额外的1x AP 500 s电池可免费提供该目录中显示的选定的Stihl AP电池工具捆绑包(每个都包括1x AP 500 s电池),并带有“免费的第二AP 500 S电池”标签。 AP 500 s电池的RRP为$ 599。 促销活动在参与的Stihl经销商中有效期为3.3.2025 - 1.6.2025,而股票则持续。 访问stihl.com.au以获取完整的T&C。×T&C适用。促销额外的1x AP 500 s电池可免费提供该目录中显示的选定的Stihl AP电池工具捆绑包(每个都包括1x AP 500 s电池),并带有“免费的第二AP 500 S电池”标签。AP 500 s电池的RRP为$ 599。 促销活动在参与的Stihl经销商中有效期为3.3.2025 - 1.6.2025,而股票则持续。 访问stihl.com.au以获取完整的T&C。AP 500 s电池的RRP为$ 599。促销活动在参与的Stihl经销商中有效期为3.3.2025 - 1.6.2025,而股票则持续。访问stihl.com.au以获取完整的T&C。
登记处任期:5年负责:...
WORKING WITH: President, Honorary Officers, Chief Executive, Board of Trustees and Associate Registrars RESPONSIBLE FOR : College Policy and communications, Workforce Wellbeing, Psychiatrists' Support Service, coaching and mentoring, Membership Engagement and Relations, Member conduct Complaints, Public Education, Regional Advisors, Regional Representatives, College Assessors
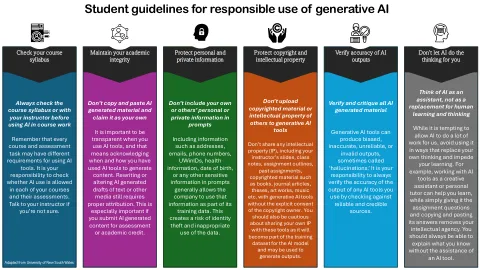

负责使用和交流的建议3
虽然定义有所不同,但种族和种族通常用于描述和分类美国社会中的个人。在这里,我们将种族定义为一种社会建构的分类,用于基于对物理特征和外观的有偏见的判断,将人类划分为群体,并且历史上一直在政治上驱动和用于建立社会等级制度3,68(有关种族的“多维”定义,请参见69)。种族通常与种族相关,也是一种社会结构,用于对多样化的人群进行分类并建立个人和团体身份70。这些术语的含义和标签已根据当代的政治和社会趋势而变化,代表了累积和动态力量(即系统性,人际和内在的种族主义),导致个人的种族化不同,或者个人在社会体系中如何“种族”。虽然不同的种族和种族可能从事各种文化实践,但研究人员应该注意不使用“种族”,“种族”和“文化”作为论文中的可互换术语。
负责采购年度政策-2024
2025年1月1日1。简介Penfold World Trade Ag(“ Penfold”)致力于进行尽职调查程序,以确保我们的供应商和采购合作伙伴以透明,道德,负责任的和环境可持续的方式来提供矿物质和金属。为此,Penfold已通过OECD Annex I和Annex II指南1以及伦敦金属交换联合勤奋标准2和LBMA负责的银牌指南3。Under this Responsible Sourcing Policy, Penfold has structured management processes and implemented specific measures under the OECD five-step framework for risk-based due diligence for responsible supply chains of minerals: STEP 1 - Establish strong company management systems STEP 2 - Identify and assess risk in the supply chain STEP 3 - Design and implement a management strategy to respond to identified risks STEP 4 - Arrange for an independent third-party audit of the supply chain due diligence STEP 5 - Report on supply chain due勤奋本年度报告总结并报告了我们2024年期间的供应链尽职调查工作。2。2024摘要[余额报告未决]

有关负责消费和生产的报告
3 CUTM1088 Thermodynamics 2+1+0 3 4 CUTM1046 Electronic Devices Systems & Applications 2+1+0 3 5 CUTM1057 Basic Electrical Engineering 1+1+0 2 6 CUTM1708 Human Anatomy and Physiology 2+1+0 3 7 CUTM1588 Industrial Pharmacy-II 4+0+0 4 8 CUTM1525 Heat Transfer 2+0+1 3 9 CUTM2330药用和芳香作物I 2+1+0 3 10 cutm2331药物和芳香作物II 2+1+1+0 3
安全负责地扩大美国核能:...
Error 500 (Server Error)!!1500.That’s an error.There was an error. Please try again later.That’s all we know.