XiaoMi-AI文件搜索系统
World File Search System超前

使用铅控制飞机的俯仰... - Ijcrt.org
______________________________________________________________________________________________ 摘要:本文介绍了使用超前补偿器和模糊控制器对纵向平面的飞机进行控制。飞行系统的设计需要线性化的纵向动力学数学模型。超前补偿器具有超前网络的特性,可改善系统的瞬态响应。为了控制俯仰角,使用 Matlab - simulink 模型来调整补偿器,并使用 Mamdani 型模糊逻辑控制器 (S.N.Deepa 和 Sudha G.2014) 通过模拟选择适当的模糊规则来调整参数。模拟结果以时域规范的形式呈现,并基于阶跃响应分析了性能。进行比较以确定哪种控制策略可以更好地响应所需的俯仰角。索引术语 - 模糊控制器、超前补偿器、纵向动力学、飞机。 ______________________________________________________________________________________________
使用铅控制飞机的俯仰... - Ijcrt.org
1 电气与电子工程,1 圣王工程与技术学院,帕姆帕库达,喀拉拉邦,印度 ______________________________________________________________________________________________ 摘要:本文介绍了使用超前补偿器和模糊控制器对纵向飞机进行控制。飞行系统设计需要线性化的纵向动力学数学模型。超前补偿器具有超前网络的特性,可改善系统的瞬态响应。为了控制俯仰角,使用 Matlab - simulink 模型来调整补偿器,使用 Mamdani 型模糊逻辑控制器(SNDeepa 和 Sudha G.2014)通过模拟选择适当的模糊规则来调整参数。模拟结果以时域规范呈现,并基于阶跃响应分析性能。进行比较以确定哪种控制策略对所需俯仰角做出更好的响应。索引术语 - 模糊控制器、超前补偿器、纵向动力学、飞机。 ______________________________________________________________________________________________

采用改进型进位算法对 FIR 滤波器进行分析与设计 ...
摘要:便携式多媒体设备和通信系统的蓬勃发展,对节省面积和功耗的高速数字信号处理 (DSP) 系统的需求也随之增加。有限脉冲响应 (FIR) 滤波器是设计高效数字信号处理系统的重要组成部分。数字有限脉冲响应 (FIR) 滤波器的使用是 DSP 中的主要模块之一。数字乘法器和加法器是 FIR 滤波器中最关键的算术功能单元,也决定了整个系统的性能。因此,低功耗系统设计已成为主要的性能目标。本文提出了一种使用超前进位加法器和乘法器设计的 FIR 滤波器。其中乘法器由改进型超前进位加法器的内部电路提出。超前进位加法器 (CLA) 用于加法运算,它使用最快的进位生成技术,通过减少修复进位位所需的时间来提高速度,而乘法器则以分层方式执行乘法过程。因此,所提出的方法可以最大限度地降低 FIR 滤波器的有效功率和延迟。初步结果表明,与传统方法相比,使用所提出的乘法器方法的 FIR 滤波器实现了更少的延迟和功率降低。所提出的 FIR 滤波器使用 Verilog 代码进行编程,并使用 Xilinx ISE 14.7 工具进行综合和实现。并使用 Xpower 分析器分析功率。关键词:进位前瞻加法器、FIR 滤波器、乘法器、数字信号处理

高效风力发电机组发电规划,降低配电系统公司成本
摘要 — 风能因其不确定性给输配电系统带来了新的挑战。风力涡轮机 (WT) 对上游网络向配电系统公司 (DISCO) 收取的实际费用的影响是一个挑战。此外,当 WT 的并网逆变器以超前或滞后模式运行时,WT 会从系统中吸收或注入无功功率。本文提出了一种方法来评估 WT 运行模式的重要性,以便在存在系统不确定性的情况下最大限度地降低 DISCO 的成本。因此,通过确定最佳重构配电系统中 WT 的最佳位置和大小,制定了一个优化问题,以最大限度地降低 DISCO 的成本。此外,提出了一种改进的基于向量的群优化 (IVBSO) 算法,因为它非常适合基于向量的问题。在模拟中使用了两个配电系统来评估所提出的算法。首先,使用 IEEE 33 节点测试系统验证了 IVBSO 算法比其他启发式算法能得出更优解的能力。其次,使用 Bijan-Abad 配电系统 (BDS) 证明了所提优化问题的有效性。据此,配电系统模型、风速累积分布函数和负荷曲线均从 BijanAbad 地区的实际数据中提取出来。最后,将优化问题应用于 BDS 中风电机组的超前和滞后模式。结果表明,当风电机组在滞后模式下运行时,配电系统的总成本低于在超前模式下运行时。

6G URLLC的量子机智能 - 赢家实验室
abtractive和任务关键数据驱动的应用程序,例如虚拟或增强现实,触觉,工业自动化和自主性移动性,在第六代网络中对超前且低延迟通信(6G)网络的超前且低延迟通信(URLLC)构成了前所未有的挑战。机器intel-ligence接近深度学习,加强学习和联合学习(FL),以提供新的范式,以确保在大数据培训的流中确保6G URLLC。但是,机器学习能力的经典局限性使得达到严格的6G URLLC要求使其具有挑战性。在本文中,我们通过利用量子资源的优势,例如叠加,插入和量子并行性来研究6G URLLC变异量子计算和量子机学习(QML)的潜力。基本的想法是将量子机智能与6G网络集成在一起,以确保严格的6G URLLC要求。作为一个例子,我们演示了NP-HARD URLLC任务的量子近似优化算法卸载优化概率。在无线网络中还采用了QML的变异量子计算,以提高机器智能的学习率并确保对关键任务应用程序的学习最佳性。考虑了量子辅助的FL,考虑了FL的安全性和隐私问题以及FL中的计算资源开销,盲目和远程时尚中的分布式量子计算进一步研究。

工程工业基础设施服务 - 2023 年第四季度。...
我们的客户范围广泛,从初创企业、中型企业到大型上市公司。我们明白,一个由创新和变革驱动的行业需要一位经验丰富的顾问,他能够超前思考市场,并利用稳固的行业关系来帮助推进您的愿景。我们通过执行执行力强、竞争性强的流程,专注于深度领域知识,以实现协同效应和稀缺价值,并利用我们世界一流的战略和私募股权渠道,将合适的高级决策者带到谈判桌上,从而优化客户成果。


互连的最低技术要求...
因素要求总功率因数范围应为互连设施(连接到 PREPA TC 或分段器)处滞后 0.85 到超前 0.85。无功功率要求是根据电压曲线和无功功率需求为系统运行提供支持所必需的。目的是 PVF 可以在互连设施(连接到 PREPA TC 或分段器)处以平滑连续的方式将无功功率从滞后 0.85 提升到超前 0.85。互连设施(连接到 PREPA TC 或分段器)处的 +/- 0.85 功率因数范围应是动态和连续的。这意味着 PVF 必须能够通过在规定的限制内连续改变电厂的无功输出来响应电力系统电压波动。如果研究表明需要额外的连续动态补偿,则可以扩大先前确定的功率因数动态范围。要求 PVF 无功能力满足 +/- 0.85 功率因数 (PF) 范围,该范围基于 PVF 聚合 MW 输出,即与最大 MW 输出相对应的最大 MVAr 能力。众所周知,正 (+) PF 是 PVF 产生 MVAr 的地方,而负 (-) PF 是 PVF 吸收 MVAr 的地方。最大输出下的 MVAr 能力要求应在 PVF 的整个运行范围内保持,如图 2 所示。MVAr 能力还应在整个互连设施(连接到 PREPA TC 或分段器)电压调节范围内(互连设施额定电压的 95% 至 105%)保持。
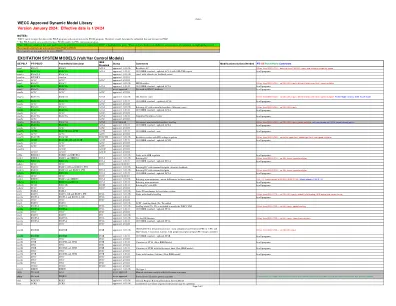
WECC 认可的动态模型库
esac3a ESAC3A ESAC3A AC3A 已批准 1/21/11 2005 IEEE 标准 - 更新 AC3A 在所有程序中 esac3c AC3C AC3C AC3C 已批准 4/22/20 exac4 EXAC4 EXAC4 AC4A 已批准 8/11/06 带可控整流器的旋转交流电 (Althyrex) (罕见) 与 IEEE AC4A 不同 - 没有 OEL/UEL 输入 esac4a ESAC4A ESAC4A AC4A 已批准 1/21/11 2005 IEEE 标准 - 更新 AC4A 在所有程序中 esac4c AC4C AC4C AC4C 已批准 4/22/20 esac5a ESAC5A ESAC5A AC5A 已批准 1/21/11 简化无刷励磁机 在所有程序中 esac5c AC5C AC5C 已批准 4/22/20 exac6a ESAC6A EXAC6A AC6A 从未批准 交流发电机,非控制整流器,超前滞后 与 IEEE AC6A 不同 - 没有 OEL/UEL 输入;速度乘法器,不是 PSS/E 的新模型(模型已经存在) esac6a ESAC6A ESAC6A AC6A 批准 1/21/11 2005 IEEE 标准 - 更新的 AC6A 在所有程序中 esac6c AC6C AC6C AC6C 批准 4/22/20 esac7b AC7B ESAC7B 和 AC7B AC7B 批准 1/21/11 2005 IEEE 标准 - 新 在所有程序中 esac7c AC7C AC7C AC7C 批准 4/22/20 exac8b ESAC8B EXAC8B ESAC8B 批准 8/11/06 带 PID 电压调节器的无刷励磁机 与 IEEE AC8B 不同 - 没有励磁机上限;增加了输入限制和速度乘数 esac8b AC8B ESAC8B_GE 和 AC8B AC8B 已批准 1/21/11 2005 IEEE 标准 - 更新了 AC8B 在所有程序中 esac8c AC8C AC8C AC8C 已批准 4/22/20 esac9c AC9C AC9C AC9C 已批准 4/22/20 esac10c AC10C AC10C 已批准 4/22/20 AC11C AC11C AC11C 已批准 4/22/20 exbbc BBSEX1 EXBBC 和 BBSEX1 已批准 8/11/06 静态带 ABB 调节器 在所有程序中 exdc1 IEEEX1 EXDC1 和 IEEEX1 DC1A 已批准 8/11/06 旋转直流 与 IEEE DC1A 不同 - 没有 UEL 输入;速度倍增器 esdc1a ESDC1A ESDC1A DC1A 已批准 1/21/11 2005 IEEE 标准 - 更新了 DC1A 在所有程序中 esdc1c DC1C DC1C DC1C 已批准 4/22/20 exdc2 EXDC2 EXDC2_GE 和 EXDC2_PTI 已批准 8/11/06 带有终端供电先导的旋转直流电、交替反馈 exdc2a EXDC2 EXDC2A 和 EXDC2_PTI DC2A 已批准 8/11/06 带有终端供电先导的旋转直流电 与 IEEE DC2A 不同 - 没有 UEL 输入;速度倍增器 esdc2a ESDC2A ESDC2A DC2A 已批准 2005 年 1 月 21 日 IEEE 标准 - 在所有程序中更新了 DC2A esdc2c DC2C DC2C DC2C 已批准 20 年 4 月 22 日 exdc4 IEEET4 EXDC4 和 IEEET4 DC3A 已批准 2006 年 8 月 11 日 旋转、非连续 - 模型间细微差别 如果 Kr = 0,应转换为 IEEEX4 (IEEE DC3A)。在 PSS/E -32 中添加了模型。 esdc3a DC3A ESDC3A 和 DC3A DC3A 已批准 1/21/11 旋转,非连续 在所有程序中 esdc4b DC4B ESDC4B DC4B 已批准 1/21/11 带 PID 的旋转直流 在所有程序中 esdc4c DC4C DC4C DC4C 已批准 4/22/20 exeli EXELI EXELI 已批准 8/11/06 静态 PI 变压器供电励磁系统 exst1 EXST1 EXST1_GE 和 EXST1_PTI ST1A 已批准 8/11/06 静态双超前/滞后 与 IEEE ST1A 不同 - 没有 OEL/UEL 输入;添加了 Xe Ifd 负载;RFB 在励磁电流限制器之前。esst1a ESST1A ESST1A 和 ESST1A_GE ST1A 已批准 1/21/11 在所有程序中 esst1c ST1C ST1C ST1C 已批准 4/22/20 exst2 EXST2 EXST2 已批准 8/11/06 SCPT - 添加了超前/滞后块(Tc、Tb) exst2a ESST2A EXST2A ST2A 已批准 8/11/06 包含超前/滞后块(Tc、Tb)以匹配 WECC FM 与 IEEE ST2A 不同 - 没有 UEL 输入;添加了超前/滞后。 esst2a ESST2A ESST2A ST2A 已批准 2005 年 1 月 21 日 IEEE 标准 - 更新的 ST2A esst2c ST2C ST2C ST2C 已批准 20 年 4 月 22 日 exst3 EXST3 EXST3 ST3 已批准 2006 年 8 月 11 日 exst3a ESST3A EXST3A ST3A 已批准 2006 年 8 月 11 日 用于 GE Generex 与 IEEE ST2A 不同 - 没有 UEL 输入;时间常数较少。esst3a ESST3A ESST3A ST3A 已批准 2005 年 1 月 21 日 IEEE 标准 - 更新的 ST3A esst3c ST3C ST3C 已批准 20 年 4 月 22 日