XiaoMi-AI文件搜索系统
World File Search System跳投

使用跳投的生成建模
基于得分的扩散模型使用时间转移的扩散过程从未知目标分布中生成样品。这种模型代表了工业应用中的最新方法,例如人造图像产生,但最近注意到,通过考虑具有重尾部特征的注入噪声,可以进一步提高其性能。在这里,我将生成扩散过程的概括性化为一类广泛的非高斯噪声过程。我考虑由标准高斯噪声驱动的前进过程,并以超级强制的泊松跳跃为代表有限的活动莱维过程。生成过程被证明由依赖跳跃幅度分布的广义分数函数控制。概率流ode和SDE配方都是使用基本技术努力得出的,并且用于从多元拉普拉斯分布中得出的跳跃振幅实现。非常重要的是,对于捕获重尾目标分布的问题,尽管没有任何重尾特性,但跳跃延伸拉普拉斯模型的表现就超过了由α-稳定噪声驱动的模型。该框架可以很容易地应用于其他跳跃统计数据,这些统计数据可以进一步改善标准扩散模型的性能。

脚手架跳脚手架学习
脚手架跳动 - 现有铅候选人的新型脚手架的设计 - 是一项多方面且非平凡的任务,用于药物化学家和计算方法。生成的增强学习可以迭代地优化从头设计的理想特性,从而提供了加速脚手架跳跃的机会。当前方法将一代限制在预定义的分子下结构中(例如,链接器或脚手架)脚手架跳。这种受限的一代可能会限制化学空间的探索,并需要复杂的分子(DIS)装配规则。在这项工作中,我们旨在通过允许“不受约束的”,全部分子的产生来推动脚手架跳跃的增强学习。这是通过匆忙(用于限制的s caffold H反对)方法来实现的。RUSH将一代推向设计,其具有与参考分子相似的三维和药效团相似的完整分子的设计,但脚手架相似性低。在第一项研究中,我们显示了急速探索已知脚手架类似物的灵活性和有效性,并设计了与已知结合机制相匹配的脚手架跳跃的候选者。最后,Rush和两种已建立的方法之间的比较突出了其无约束分子生成的好处,以系统地实现脚手架多样性,同时保留最佳的三维特性。
国家人工智能研发战略计划:2019年更新 - 投研数据库
2019年更新:持续对基础AI研究进行长期投资 ............................................................................................. 7 推进以数据为中心的知识发现方法 .................................................................................................................................. 9 增强AI系统的感知能力 .................................................................................................................................................... 9 了解AI的理论能力和局限性 ............................................................................................................................................ 10 开展通用人工智能研究 .................................................................................................................................................. 10 开发可扩展的AI系统 ........................................................................................................................................................ 11 促进人类AI的研究 ............................................................................................................................................................ 11 开发更强大,更可靠的机器人 ...................................................................................................................................... 11 推进硬件以改进AI ............................................................................................................................................................ 12 创建AI以改进硬件 ............................................................................................................................................................ 12 战略2:开发有效的人工智能协作方法 ................................................................................................................ 14
国家人工智能研发战略计划:2019年更新 - 投研数据库
2019年更新:持续对基础AI研究进行长期投资 ............................................................................................. 7 推进以数据为中心的知识发现方法 .................................................................................................................................. 9 增强AI系统的感知能力 .................................................................................................................................................... 9 了解AI的理论能力和局限性 ............................................................................................................................................ 10 开展通用人工智能研究 .................................................................................................................................................. 10 开发可扩展的AI系统 ........................................................................................................................................................ 11 促进人类AI的研究 ............................................................................................................................................................ 11 开发更强大,更可靠的机器人 ...................................................................................................................................... 11 推进硬件以改进AI ............................................................................................................................................................ 12 创建AI以改进硬件 ................................................................................


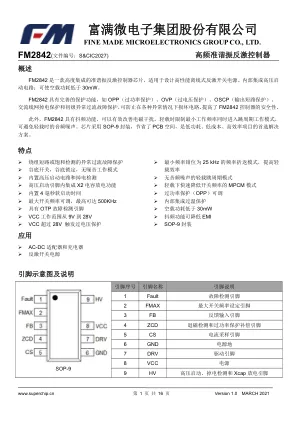
富满微电子集团股份有限公司
为了进一步避免声音噪声,该电路通过将跳周期模式期间的突发频率限制在 800 Hz 的最大值来防止开关频率 进入可听范围。这是通过一个定时器实现的,该定时器在安静的跳周期工作模式期间被激活。在该计时器计数结束 前,不允许打开开关周期。随着输出功率的降低,开关频率降低,一旦达到 25 kHz ,即达到进入入阈值并进入跳 周期模式。关闭开关管,停止开关周期,一旦开关停止, FB 将上升。一旦 FB 越过跳周期退出阈值(这时仍然为 跳周期工作模式),则打开驱动脉冲。此时,一个 1.25 ms 的计时器 tquiet 与一个计数到 3 的计数器一起启动。下 次 FB 电压降至跳入阈值以下时,只要计数到 3 个驱动脉冲,驱动脉冲就会在当前脉冲结束时停止(至少打开 3 个 开关脉冲)。在计时器计时结束之前不允许再次启动,即使先达到跳周期的退出阈值。需要注意的是,计时器不会 强制下一个循环开始,如果在计时器计时结束时未达到跳周期的退出阈值,则驱动脉冲将等待 FB 达到跳周期退出 阈值。这意味着在空载期间,每次开关至少会有 3 个驱动脉冲,脉冲串间隔周期可能远长于 1.25 ms 。该工作模式 有助于提高空载条件下的效率。 FB 电压必须升高超过 1 V ,才退出跳周期模式。如果在 tquiet 计时结束前 FB 电压 大于 1V ,则驱动脉冲将立即恢复,即控制器不会等待计时器结束。图 4 提供了一个安静跳周期工作原理的示例。

跳岛游——脚干燥!
驾驶着通用防务电动 Silverado ZH2 卡车驶上 C-130 的坡道,军士长罗恩·杰克逊小心翼翼地操纵车辆,确保连接的 Silent Falcon 陶瓷复合材料拖车与飞机机身对齐。1 他全神贯注地听从装载长的手势,突然想起上次他这样做时,不小心撞到了货舱边缘。“这次不会再这样了,”他想,不禁皱起眉头,想起了另一架飞机的装载长在“认真回顾”飞机损坏情况时使用的“选择性语言”,以及他自己的 Silent Falcon 团队成员对他的嘲讽。“飞机上只有一些油漆,拖车的‘透明涂层’(MXene 电磁干扰涂层)中确实含有钛;所以,拖车甚至没有损坏……”此外,我们之所以要跳伞,是因为多诺维亚导弹即将来袭,而且机场另一边还有叛乱分子的袭击。” 2 杰克逊小心翼翼地把卡车调平,把拖车缓缓地推入飞机,然后把车停了下来。他向装卸长挥了挥手,然后
