XiaoMi-AI文件搜索系统
World File Search System载荷计算

失速状态下旋翼性能和载荷计算...
使用 1/10 比例 CH-47B/C 型转子的风洞试验数据研究失速条件下的转子行为,该风洞试验提供了一组测试条件,从未失速到轻度失速到一些深度失速条件,涵盖了很宽的前进比范围。在风洞中测量的转子性能与 NASA/Army UH-60A 空气载荷计划期间测量的主转子性能相似,尽管这两个转子完全不同。分析 CAMRAD II 已用于预测转子性能和载荷。全尺寸翼型试验数据针对雷诺数效应进行了校正,以便与模型比例转子试验进行比较。计算出的功率系数与雷诺数校正翼型表的失速以下测量值显示出良好的相关性。计算中使用了各种动态失速模型。波音模型显示升力在低推进比时增加,而 Leishman-Beddoes 模型在 µ = 0.2 时显示扭矩相关性优于其他模型。然而,动态失速模型通常对转子功率和扭矩预测的影响很小,尤其是在较高的推进比下。

美国农业部森林服务局飞机检查员指南
图 42:FS 5700-33 ...................................................................................................................... 99 图 43:点对点卡 ...................................................................................................................... 100 图 44:服务卡车 – 机构间数据卡 ................................................................................................ 101 图 45:机械师资格表(第 1 页) ............................................................................................. 102 图 46:机械师资格表(第 2 页) ............................................................................................. 103 图 47:机械师资格卡 ............................................................................................................. 103 图 48:机构间直升机载荷计算 (OAS-67/FS 5700-17) ........................................................................ 104 图 49:返回合同可用性跟踪表(正面) ................................................................................. 105 图 50:使用前检查流程图 ................................................................................................. 109 图 51: FS-5700-17 跨部门直升机载荷计算 .............................................................................. 121 图 52:承包商监督清单 ...................................................................................................... 123 图 53:内部检查指南 ............................................................................................................ 133 图
NWCG 直升机操作标准 - WA - DNR
简介 ................................................................................................................................................ 187 人员职责、资格、认证和培训 .............................................................................................................. 187 运营规划 .............................................................................................................................................. 187 飞行跟踪、资源跟踪和通信 ............................................................................................................. 188 人员和设备审批及梳理 ...................................................................................................................... 188 直升机能力和限制 ............................................................................................................................. 189 直升机载荷计算和清单 ...................................................................................................................... 189 直升机着陆区 ...................................................................................................................................... 189 设备要求和维护 ............................................................................................................................. 189 人员运输 ............................................................................................................................................. 190 货物运输 ................................................................................................................
咨询服务疑问澄清:输电线路设计、塔架定位/调度、工程量清单编制和 Sitalpat 成本估算
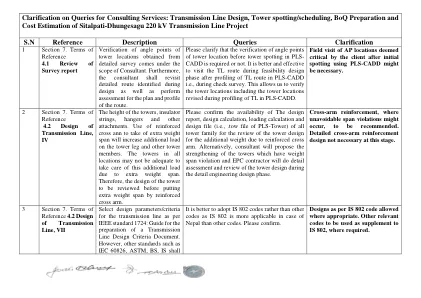
请确认所有塔系列的设计报告、设计计算、载荷计算和设计文件(即 PLS-Tower 的 .tow 文件)的可用性,以便审查塔设计中因加固横臂而产生的额外重量。或者,顾问将建议对重量跨度违规的塔进行加固,EPC 承包商将在详细工程设计阶段对塔设计进行详细评估和审查。
哪种缩放规则适用于大型人工神经网络
摘要经验表明,合作和交流计算系统,包括隔离的单个处理器,具有严重的性能限制,无法使用von Neumann的经典计算范式来解释。在他的经典“初稿”中,他警告说,使用“太快的处理器”“使他的简单“ procepure'”(但不是他的计算模型!);此外,使用经典的计算范式模仿神经元操作是不合适的。Amdahl补充说,包括许多处理器的大型机器具有固有的劣势。鉴于人工神经网络(ANN)的组件正在互相进行大量通信,因此它们是由用于常规计算中设计/制造的大量组件构建的,此外,它们还试图使用不当的生物学操作使用不正确的技术解决方案及其可实现的有效载荷计算量表,这是概念上的模型。基于人工智能的系统的工作负载类型会产生极低的有效载荷计算性能,其设计/技术将其大小限制在“'toy'级别的系统:基于处理器的ANN系统的缩放标准)上是强烈的非线性。鉴于ANN系统的扩散和规模不断增长,我们建议您提前估算设备或应用的效率。ANN实施和专有技术数据的财富不再启用。通过分析已发布的测量结果,我们提供了证据表明,数据传输时间的作用极大地影响了ANN的性能和可行性。讨论了一些主要的理论限制因素,ANN的层结构及其技术实施方法如何影响其效率。该论文始于冯·诺伊曼(Von Neumann)的原始模型,而没有忽略处理时间的转移时间,并为Amdahl定律提供了适当的解释和处理。它表明,在这一提示中,Amdahl的定律正确地描述了ANN。

TrustPoint“时光飞逝”立方体卫星技术描述
有效载荷子系统:有效载荷子系统执行 TrustPoint 的替代定位、导航和授时 (PNT) 服务所需的机载处理、RF 信号生成和高精度计时。有效载荷由用于有效载荷计算和波形生成的数字子系统、GNSS 接收器(参见上面的通信系统部分)、用于计时的时钟子系统和用于放大和过滤的 RF 模拟子系统组成。在总线底盘的外部,有效载荷与两个 C 波段发射天线、一个 C 波段接收天线和一个 GNSS 天线连接,所有这些都是共形非可展开贴片天线。总线底盘的外部还安装了一个激光反射器,用于支持高精度轨道测定的激光测距实验。
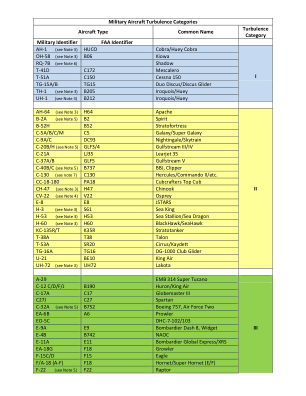
军用飞机湍流类别
注 1:本表中的湍流类别是根据翼展、翼面积、纵横比、锥度比、机翼后掠角等飞机因素得出的。因此,应将本表视为权威;但是,飞机的重量、空速和/或高度可能会改变其湍流类别,使其与本表中的默认值不同。原始源文件为 AFWAL-TR-81 3058。如需更新和飞机补充,请联系 AFLCMC/XZIG,DSN 785- 2299/2310。注 2:如果未列出飞机,可以进行以下保守湍流类别划分:在 FL180 或以上飞行的喷气式飞机和多引擎螺旋桨/涡轮螺旋桨飞机可视为 II 类。所有其他飞机都应视为 I 类。注 3:直升机的湍流类别主要根据机组人员的反馈确定。由于直升机的复杂性增加,固定翼飞机所用的方法不适用于直升机。注 4:CV-22 显示的飞行方面包括旋翼机翼操作,因此无法对旋翼飞行阶段(例如起飞/降落)进行客观阵风载荷计算和湍流分类。
克兰菲尔德大学 新型摆臂机构...
摘要 � iii 致谢 � iv 目录 � 图表 � vi 表格表 � vii 1 � 介绍 � 1 1.1 � 概述 � 1 1.2 研究背景 � 2 1.3 研究目标 � 5 1.4 研究方法 � 6 2 � 文献综述 � 8 2.1 � 增升装置基础知识 � 8 2.2 常规后缘增升装置 � 10 2.3 后缘增升装置的机构类型 � 16 2.4 摆臂机构在增升装置中的应用 � 21 3 机构设计 � 26 3.1 机翼平面形状参数 � 26 3.2 襟翼翼型设计 � 26 3.3 摆臂襟翼机构原理 � 27 3.4 部件初始尺寸 � 32 3.5 改进程序和最终设计 � 36 3.6 襟翼载荷计算 � 44 3.7 机械应力分析 � 46 3.8 作动系统布置 � 47 3.9 讨论 � 51 3.10 � 机构设计总结 � 54 4 质量比较 � 55 4.1 传统襟翼机构的质量估算 � 55 4.2 摆臂机构的质量 � 56 4.3 比较结果 � 57 5 � 结论和未来工作 � 59 5.1 � 结论 � 59 5.2 未来工作 � 60 6 参考文献 � 62 7 参考书目 � 64 附录 A � 65 附录 B � 91 附录 C � 109 附录 K � 119
目录 - 船舶结构委员会
目录 1.0 简介 1 2.0 背景 12 2.1 识别关键疲劳敏感细节 12 2.2 断裂行为类型 15 2.3 断裂力学分析 16 3.0 断裂试验 35 3.1 试样制作、残余应力和材料特性 35 3.2 带结构细节的工字梁弯曲 41 3.3 带加筋壳的箱梁弯曲 45 3.4 带孔和 CCT 拉伸试样 47 4.0 试验分析 98 4.1 PD6493 计算 100 4.2 扩展裂纹的塑性极限载荷计算 111 4.3 计算施加 J 的有限元分析 112 4.4 J 估算方案 115 4.5 通过 J-R 曲线分析预测裂纹扩展121 4.6 Landes 归一化方法 125 4.7 通过裂纹张开角预测裂纹扩展 129 5.0 延性断裂模型在船舶结构中的应用指南 180 5.1 钢材和填充金属的规格 180 5.2 断裂力学试验方法 183 5.3 推荐的延性断裂模型 185 6.0 结论和进一步研究的建议 191 附录 1:HSLA-80 和 EH-36 材料的选定 J-R 曲线 附录 2:工字梁实验的实验数据 附录 3:箱梁实验的实验数据 附录 4:Cope-Hole 实验的实验数据 附录 5:样品应力强度因子计算 附录 6:工字梁和箱梁试件的极限载荷预测