XiaoMi-AI文件搜索系统
World File Search System输出脉冲

使用 Sn74ahc123a 和 Sn74ahct123a 进行设计
操作规则3.。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。输出脉冲持续时间 3 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。计算 4。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。重新触发数据 6 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。输出脉冲持续时间因温度和 V CC 电平而变化 7 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
使用 Sn74ahc123a 和 Sn74ahct123a 进行设计
操作规则 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 输出脉冲持续时间 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................. ... ... 重新触发数据 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......

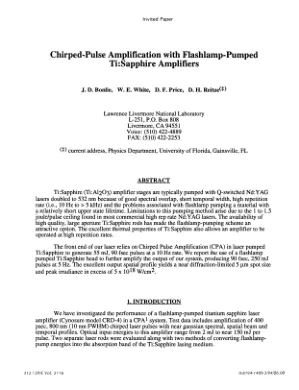
闪光灯泵浦啁啾脉冲放大
我们的系统由 White 等人 2 详细描述,并如图 1 所示,类似于许多基于激光泵浦钛宝石的 CPA 系统 3' 5,这些系统目前正在使用或商业化生产。由氩离子激光器 (9 W,所有线) 泵浦的商用锁模钛宝石振荡器产生 82 MHz 的 80-100 fsec 脉冲序列,中心波长为 800 nm (10 nm FWHM 高斯光谱分布)。这些 10-15 nJ 脉冲在单个衍射光栅脉冲展宽器 7 中被时间展宽至约 400 psec。展宽器由 1800 线/毫米镀金全息衍射光栅、60 厘米焦距消色差透镜和平面高反射铝镜组成。在通过该展宽器的八次过程中,实现了正群速度色散以及信号丢失。产生的输出脉冲为 4-5 nJ,用于为再生放大器提供种子。

由 1 kHz 钛宝石激光脉冲泵浦的光参量放大器的高转换效率,可产生可调谐的高次谐波
摘要:我们报告称,通过将市售的 Ti:Sapphire 飞秒、1 kHz 激光系统与光参量放大器 (OPA) 相结合,实现了近 50% 的高转换效率。对于 1 kHz 和 35 fs 持续时间的 2.2 mJ/脉冲的输入能量,在信号波长为 1310 nm 时,信号加上闲置脉冲的总 OPA 输出能量为 1.09 mJ/脉冲。我们发现,由于 OPA 中的高增益饱和,输出光束轮廓几乎是平顶的。利用信号脉冲,我们在气体中产生高次谐波,并测量从氩气中电离的光电子的速度图图像与信号波长的关系。我们观察到,在高次谐波光子能量的特定范围内,在低动能区域观察到四倍光电子角结构。我们的结果表明,具有高转换效率OPA和超高斯光束轮廓的输出脉冲可用于需要在极紫外区域产生可调谐高次谐波的实验。
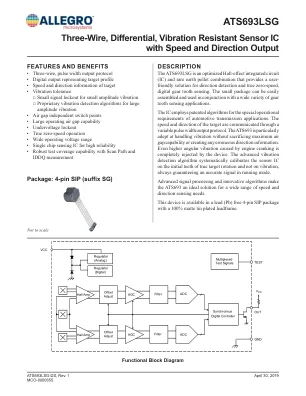
ATS693LSG - Allegro MicroSystems
1 典型值为 T A = 25°C 和 V CC = 12 V。在规定的最大和最小限度内,单个单元的性能可能有所不同。2 必须根据功耗和结温调整最大电压;请参阅功率降额部分。3 负电流定义为从指定设备端子流出(源自)的常规电流。4 超过钳位电压的持续电压可能会对 IC 造成永久性损坏。5 脉冲持续时间在 V PULLUP / 2 的阈值处测量。6 工作频率(反向旋转)和工作频率(无方向脉冲)的最大值由输出脉冲的令人满意的分离决定:V OUT(HIGH) 为 t w(FWD)(最小值)。如果客户能够解决较短的高状态持续时间,则最大 f FWD 、f REV 和 f ND 可能会增加。7 如果在信号变化事件期间或之后未保持最小信号相位分离,则输出可能会消隐或出现无方向脉冲。通电期间的信号变化事件可能会增加获得正确方向脉冲所需的边沿数量。8 通电频率 ≤ 200 Hz。更高的通电频率可能需要更多的输入磁循环,直到实现定向输出脉冲。

Hines, Adam D.、Stratton, Peter G.、Milford, Michael 和 Fischer, Tobias (2024) VPRTempo:一种用于视觉的快速时间编码脉冲神经网络
摘要 — 脉冲神经网络 (SNN) 凭借其潜在的节能、低延迟和持续学习能力,处于神经形态计算的前沿。虽然这些功能非常适合机器人任务,但迄今为止,SNN 在该领域的应用有限。这项工作引入了一种用于视觉位置识别 (VPR) 的 SNN,它既可以在几分钟内训练,又可以在几毫秒内查询,非常适合部署在计算受限的机器人系统上。我们提出的系统 VPRTempo 使用抽象的 SNN 克服了训练和推理时间缓慢的问题,该 SNN 以生物现实性换取效率。VPRTempo 采用时间代码,根据像素的强度确定单个脉冲的时间,而之前的 SNN 则依赖于确定脉冲数量的速率编码;将脉冲效率提高了 100% 以上。 VPRTempo 使用脉冲时间依赖性可塑性和监督增量学习规则进行训练,强制每个输出脉冲神经元只对一个位置做出反应。我们在 Nordland 和 Oxford RobotCar 基准定位数据集上评估了我们的系统,这些数据集包含多达 27,000 个位置。我们发现 VPRTempo 的准确性与之前的 SNN 和流行的 NetVLAD 位置识别算法相当,同时速度快几个数量级,适合实时部署 - CPU 上的推理速度超过 50 Hz。VPRTempo 可以作为在线 SLAM 的环路闭合组件集成到资源受限的系统(例如太空和水下机器人)上。
第三届国际辐射物理和化学大会...
可以直接从腔体输出非常快的高电流和高电压脉冲,而无需任何复杂的脉冲形成和脉冲压缩网络。由于输出脉冲上升时间和宽度可以轻松定制(脉冲成形)以满足特定应用需求,因此负载可以是真空电子二极管、z 型线阵列、气体喷射、衬套、等熵压缩负载 (ICE)(用于研究非常高磁场下的材料行为)或聚变能 (IFE) 目标。根据桑迪亚实验室的合同,俄罗斯托木斯克的高电流电子研究所 (HCEI) 设计和建造了十个 1-MA LTD 腔体。这些腔体最初设计为在真空或磁绝缘传输线 (MITL) 电压加法器配置中运行。在这种模式下成功运行后,我们正在逐步对其进行修改,使其能够在去离子水绝缘电压加法器中组装运行。特别注意通过过滤进行清洁,去除溶解和自由水,并除去腔体中的油。除了去离子和去除气泡外,还对电压加法器的水进行了类似的处理。为此,设计和建造了两个连续运行的水和油再循环系统。最重要的 LTD 驱动器应用之一 (IFE) 将需要不间断地进行数万次射击。目前,我们正在运行两个经过修改的腔体,这些腔体具有更坚固的组件和专门设计的

神经形态入门套件的披露
神经形态计算是一种受大脑启发的计算方法。神经形态计算的主要构造是脉冲神经网络 (SNN),许多资料对此进行了解释 [20]、[24]。我们使用术语“神经处理器”来定义一种计算设备,在该设备上可以加载脉冲神经网络,然后将输入脉冲暂时应用于特定的输入神经元。神经处理器处理脉冲并运行 SNN,在整个网络中传播脉冲。有指定的输出神经元,可以从外部读取脉冲。有许多神经处理器模拟器 [3]、[5]、[10] 和硬件项目 [1]、[4]、[8]、[24]。然而,大多数硬件项目都是商业性的,或者由研究项目以各个研究小组独有的方式运行。我们这项工作的目的是提供一种低成本、灵活的硬件套件,研究人员可以使用它来探索神经形态计算。具体来说,我们的目标是让该套件能够实现一种简单且廉价的机制,用于开发由神经处理器驱动的物理应用。我们的灵感之一来自代尔夫特大学的一个项目,其中的作者实现了一个神经形态 PID 控制器,用于调整 MAV 的高度 [28]。作者显然需要一个小型、轻便、自封装的系统,用于将传感器输入转换为脉冲,将这些脉冲发送到神经处理器,然后解释输出脉冲。我们设计了该套件用于类似这样的用例。在本文的后续部分中,我们将描述套件的组件、它们的组成、示例套件和物理应用。

麻省理工学院开放获取文章
摘要 — 激光交联可提供高数据速率通信和精确时间传输与测距,使用小尺寸、重量和功率 (SWaP) 终端来实现小型卫星星座。立方体卫星激光红外交联 (CLICK) 任务将演示能够进行全双工、高数据速率交联并实现低地球轨道 (LEO) 上 3U 立方体卫星高精度测距的终端。初始风险降低任务 CLICK-A 将演示至少 10 Mbps 的下行链路到 28 厘米孔径光学地面站。CLICK-B 和 CLICK-C 将随后演示激光交联,数据速率至少为 20 Mbps,间隔距离从 25 公里到 580 公里。CLICK-B/C 任务还将演示优于 50 厘米的高精度测距。实现这些能力的关键是发射机和精细指向、捕获和跟踪 (PAT) 系统的性能。我们介绍了最近对发射器和 PAT 子系统的测试和特性分析结果。发射器的测试包括确认种子激光器和半导体光放大器 (SOA) 的输出功率和调制,以及表征输出脉冲形状。对于 PAT 系统,测试重点是表征用于闭环精细 PAT 序列的象限光电二极管的噪声。该测试是使用专用的硬件在环测试台和光学测试装置进行的。CLICK-A 预计将于 2022 年 5 月之前发射,并于 2022 年 6 月从国际空间站 (ISS) 部署,而 CLICK-B/C 预计将于 2022 年底发射。索引术语 — 激光、光学、交联、卫星间、立方体卫星、通信