XiaoMi-AI文件搜索系统
World File Search System近场

劳拉·波利梅诺(Laura Polimeno)博士
2018 年 2 月 – 2021 年 4 月] 物理学博士,CNR Nanotec - 萨兰托大学。 博士讨论日期:2021 年 8 月 2 日。 论文题目:2D 钙钛矿中的极化子 研究领域:新型 2D 材料中室温下光子与激子之间的强耦合状态。 专长:光学测量(远场和近场)的设计和实验实现、用条纹相机进行时间分辨测量、低温光学测量、钙钛矿溶液的合成、钙钛矿单晶的制备、2D 材料的剥离、金属蒸发。 使用 HPD-TA 和 LightField 软件采集和分析数据。 使用 Wolfram Mathematica、OriginLab 软件进行数据分析。 使用 S4 进行理论模拟。 实验室:
碳化物中固有缺陷的理论研究...
图。2。示意图说明了对带电缺陷的DFT超级电池计算的远程筛选能量的评估。(a)带电荷Q的批量缺陷具有介电筛选,该筛选有限地扩展,刻有正方形,表明计算超级电池的范围。(b)DFT Supercell在超级电池并行教的全净电荷Q中汇总,通过从超级电池边缘绘制电子来筛选近场的区域,从而降低边缘区域。(c)等效体积球,半径为R Vol,需要评估远程筛选能量。(d)R皮肤减少了此半径以解释未经筛选的细胞体积,从而导致R JOST定义的JOST经典介电筛选。

组合问题的解决方案的分子计算
ERA1分钟以获得具有良好信号到噪声的近场荧光光谱。此外,Xie和Dunn(33)以及Ambrose等人的最新工作。(34)表明,金属涂层的探针尖端可以显着扰动所检测到的分子的电子正确。在很大程度上,远场共聚焦荧光广告提供了无限的激光吞吐量和三维截面的capabil,但确实是无创的,尽管其分辨率受到衍射有限。这些效果有望允许在单分子水平上以及在线荧光鉴定和分类内分子和auantum构造的纳米结构上的在线荧光鉴定和分类。这项工作中实现的非凡灵敏度允许对单个分子的动力学以及这种分子在溶液中可能经历的化学和生化作用的直接,实时研究。

完全可植入人体的无线脑机接口
与外部设备交互。在过去的几十年里,由于技术挑战,大多数 BCI 进展都局限于动物实验或有线连接的人类受试者,从而阻碍了它们在治疗神经系统疾病或增强人类能力方面的应用。Neuralink 最近取得的突破标志着首次成功将完全无线的 BCI 设备植入人脑并有效检测脉冲活动。值得注意的是,这款名为 N1 的设备只有一枚硬币大小,但却具备记录和传输脑信号、无线充电和通过蓝牙通信的全部功能(图 1)。同样,NEO 也是一种无线设备,尽管略大一些(大约是两个平行硬币的大小)。NEO 由近场通信 (NFC) 供电,也通过 NFC 进行通信,因此无需电池。这两款设备的主要区别在于

识别均匀的医疗保健使用概况和
硅纳米结构(如纳米式阵列)在各种应用中具有巨大的潜力,例如光伏电池[1],传感器[2],信息存储[3],仅举几例。纳米果(NNS)被定义为具有较高纵横比的纳米材料。那些属于两个主要类别:单针,外部操纵以接触细胞和组织(近场显微镜(AFM),微型操纵器)或支持基板支撑的垂直高纵横比纳米结构的阵列。前者涵盖了各种纳米结构,包括纳米线,纳米柱,多孔纳米酮,纳米管和纳米膜。各种材料/尺寸/形状使每种类型的NN具有不同的特定感应需求的特性,也就是说,在机械生物学,纳米电机生理学,光遗传学,纳米遗传学,转染/载体化/矢量化(药物输送)中,各种应用[4] [4]。

人为反应性氮的全球净气候效应
摘要:由于引人入胜的相变现象,二氧化钒(VO 2)中绝缘和金属相的稳定共存引起了重大研究的兴趣。但是,在VO 2的不同阶段,电荷载体的时间行为仍然难以捉摸。在此,我们采用近场光学纳米镜检查来捕获弯曲VO 2纳米梁中的纳米级交替相域。通过在不同阶段进行瞬态测量,我们观察到在VO 2的金属相中延长的载体重组寿命,并伴随着加速的扩散过程。我们的发现揭示了VO 2纳米梁中的纳米级载体动力学,提供了洞察力,可以促进对相变材料的进一步研究及其在感应和微电机械设备中的潜在应用。关键字:二氧化钒,应变工程,载体动力学,相变,S-SNOM■简介
陆地巡检机器人关键技术及其在水产养殖中的应用前景
陆地巡检机器人在执行各种任务时,需要感知周围 环境、定位自身位置、识别目标对象等,这些功能的实 现都依赖于传感器为机器人提供与外部环境交互的 “ 感 知器官 ” 。传感器是陆地巡检机器人的重要组成部分, 能够感知周围环境并获取相关信息,帮助机器人感进行 自主导航、避障、监测、抓取等工作。曹现刚等 [ 13 ] 设计 一种固定柔性轨道式悬挂巡检机器人平台,以解决煤矿 井下特种巡检机器人在三维环境重建和非结构环境运动 轨迹规划等关键技术,利用轨道,降低轨道铺设,为煤 矿环境巡检提供新的特种巡检平台。张书亮等 [ 14 ] 研究了 室内移动机器人的定位问题,提出融合轮式里程计、惯 性测量单元 IMU(inertial measurement unit) 、超宽带 UWB(ultra wide band) 和激光雷达定位数据的方法,依次 对不同传感器的定位数据进行融合,提高室内移动机器 人的定位精度。梁莉娟等 [ 15 ] 建立场景环境坐标系,利用 传感器探测出障碍物信息,对探测到的障碍物进行定位, 制定激光近场探测传感器的动态避障行为。李琳等 [ 16 ] 提 出基于条纹式激光传感器的机器人焊缝跟踪系统,采用 机器人末端安装条纹激光传感器,通过小波变换模极大 值理论分析焊缝轮廓,确定焊缝特征点。王正家等 [ 17 ] 提 出一种基于多传感器的机器人夹取系统,融合机器人内 置传感器所测量的位置、速度和角度等信息,利用外置 传感器完成对目标物的自动识别与定位。 2.1.1 传感器的使用场景及应用分类

具有简便制造参数的逆向设计超表面
摘要 光学超表面是平面纳米结构器件,具有工业吸引力,部分原因是它们利用高通量微电子制造技术来实现。因此,开发能够平衡高效波前响应实现和器件可制造性的设计范例至关重要。我们引入了一种基于梯度的自由曲面超表面设计框架,其中纳米级元素明确限制为基本形状、几乎均匀的特征尺寸和极低的纵横比。尽管超表面几何特征看似均匀,但这些器件能够利用非局部近场光耦合实现超越传统设计方法的高效和极端波前散射。利用这种方法,我们设计了简单的高数值孔径器件,例如能够实现衍射极限聚焦的光束偏转器和大面积超透镜。我们预计这些概念可以促进超表面的设计和集成到单片光学系统中。
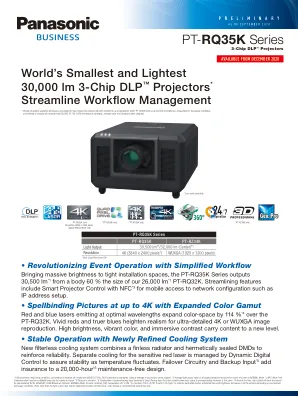
PT-RQ35K 系列 - 投影机中心
*1 测量、测量条件和符号方法均符合 ISO/IEC 21118: 2020 国际标准。值为所有产品出厂时的平均值。*2 在正常模式下,在屏幕中心测量的所有出厂产品的平均光输出值。*3 NFC(近场通信)功能的可用性可能因国家或地区而异。*4 松下研究。*5 主/备用输入端子的组合是固定的。当主/备用端子的输入信号相同时,备用输入功能启用。*6 此时,光输出将减少约 50%。IEC62087: 2008 广播内容,正常模式,动态对比度 [开],温度 35 °C (95 °F),海拔 700 米 (2,297 英尺),空气中颗粒物 0.15 mg/m 3。亮度降至 50% 的预计时间将因环境和使用条件而异。光源以外的部件可能需要在 20,000 小时之前更换,建议在此期间进行检查。

等离子准晶体中的四维保守拓扑载体
根据Noether定理,物理系统中的对称性与保守数量交织在一起。这些对称性通常决定系统拓扑,这会随着维度的增加而变得更加复杂。准晶体既没有翻译也不具有全局旋转对称性,但它们本质上居住在一个高维空间中,在该空间中,对称性浮出水面。在这里,我们发现了拓扑电荷向量,该拓扑载体在四个维度(4D)中,这些维度(4D)控制了2D准晶体的真实空间拓扑,并揭示了其固有的保护定律。我们证明了对五边形等离子体式准乳头中拓扑的控制,并由相分辨和时间域近场显微镜绘制,表明它们的时间进化不断地调节其独特的4D拓扑的2D投影。我们的工作提供了一种实验探测4D及以上拓扑物理学的热力学特性的途径。t