XiaoMi-AI文件搜索系统
World File Search System锁步

带稳定性增强器的无尾飞行器增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模(IBS)控制器,用于无尾飞机的轨迹控制,该控制器具有未知干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种限制虚拟控制输入速率和幅度的稳定性增强器(SE)。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,将激活第一层 SE 来修改轨迹跟踪误差;当虚拟控制输入超出边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。在 SE 的帮助下,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数自适应估计器,与 IBS 相结合,使控制器表现出良好的鲁棒性。最后,给出了两个仿真。第一次仿真表明系统对外部干扰和模型不确定性不敏感,第二次仿真证明了 SE 的有效性。
基于反步滑模的共轴旋翼飞行器轨迹跟踪控制算法及试验
摘要:针对共轴旋翼飞行器自主飞行过程中模型参数的不确定性、外界扰动及传感器噪声对飞行的影响,研究位置姿态反馈控制系统的鲁棒反步滑模控制算法,以解决未知外界干扰情况下飞行器的轨迹跟踪问题。本文针对未知飞行,建立了基于受扰共轴旋翼飞行器的非线性动力学模型。然后,设计了非线性鲁棒反步滑模控制器,分为共轴旋翼飞行器的姿态控制器和位置控制器两个子控制器。在控制器中引入虚拟控制,构造Lyapunov函数,保证各子系统的稳定性。通过数值仿真验证了所提控制器的有效性。最后通过飞行试验验证了反步滑模控制算法的有效性。
文章 带稳定性增强器的无尾飞机增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模 (IBS) 控制器,用于无尾飞机的轨迹控制,该飞机具有未知的干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种稳定性增强器 (SE),它限制了虚拟控制输入的速率和幅度。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,第一层 SE 将被激活以修改轨迹跟踪误差;当虚拟控制输入超过边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。借助 SE,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数的自适应估计器,与 IBS 一起,使控制器表现出出色的鲁棒性。最后,给出了两个仿真结果。第一次仿真表明系统对外界干扰和模型不确定性不敏感,第二次仿真证明了SE的有效性。
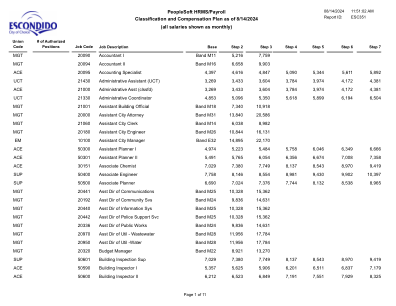
截至 2024 年 8 月 14 日的 PeopleSoft HRMS/薪资分类和薪酬计划
职位代码 职位描述 工会代码库 第 2 步 授权职位数 第 3 步 第 4 步 第 5 步 第 6 步 第 7 步

认识AI
● AI 需要耗费大量的运算资源,例如: Google 可以使用AI 成功辨识照片上的猫,在成功之前让AI 观看了20000000 张有猫的照片,没有高效能硬体的帮助,这样的训练过程必须耗费10 年以上。 ● 由于CPU 制程的进步,再加上用来产生3D 图形的GPU ,使得AI 获得了空前的成功。例如: AlphaGo 从国小的棋力进步到打败世界冠军,只花了短短2 年的时间,当时使用了176 颗GPU ,是一台超级电脑。 ● 2017 年Google 发明了专门为AI 优化的TPU 来取代GPU ,目前只要一台搭载4 TPU 的个人电脑,搭载AlphaZero AI ,训练3 天就可以打败AlphaGo 。
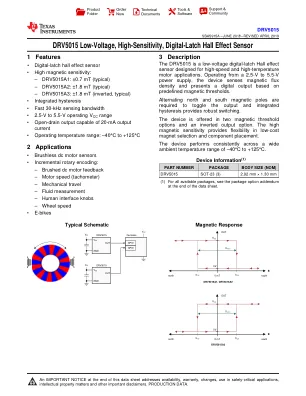
DRV5015 低压、高灵敏度、数字锁存霍尔效应传感器数据表 (Rev. A)
DRV5015 是一款磁性传感器,具有数字输出,可锁存最近测量的极点。上电期间,如果没有外部磁场,DRV5015A1 和 DRV5015A2 默认为低输出状态,而 DRV5015A3 默认为高输出状态。在封装顶部附近施加南磁极会导致 DRV5015A1 和 DRV5015A2 输出驱动为低,而北磁极会导致此输出驱动为高。在封装顶部附近施加南磁极会导致 DRV5015A3 输出驱动为高,而北磁极会导致此输出驱动为低。没有磁场会导致输出继续驱动当前状态,无论是低还是高。

高性能辐射硬化NMOS仅基于Schmitt触发闩锁设计
基于缩放晶体管的抽象CMOS电路通常比采用大面积对应物的电路更容易受到辐射环境中能量颗粒引起的软误差的影响。在本文中,在Schmitt触发器上构建了一个软误差闩锁,它完全用NMOS晶体管实现,并提出了额外的电压助推器(我们称为NST-VB)。为了评估电路的辐射弹性,我们通过分析各种闩锁内部敏感节点的临界电荷来识别最敏感的节点。我们还检查了必需闩锁的线性能量传递(LET),并观察到NST-VB闩锁具有0:386mevcm 2 = mg的提高LET,与0:231mevcm 2 = mg和0:365mevcm 2 = mg 2 = mg 2 = mg 2 = mg 2 = mg,分别为latch and latch and st latch。在过程变化分析中,我们进一步检查了5K蒙特卡洛模拟,以分析设备可变性对我们的设计的影响,并观察到所提出的NST-VB闩锁具有1:96关于ST LATCH的可变性较小的关键电压。此外,NST-VB闩锁的逻辑闪烁概率为48.32%,而ST闩锁的逻辑概率为53.04%。此外,与其他考虑的闩锁相比,计算并评估了拟议闩锁有效性的功率延迟面积比(QPAR)的关键电荷。

频率梳源的计量:评估从多模到锁模操作的相干性
摘要:自本世纪初以来,频率梳发生器已经重塑了频率计量学和相关领域。自首次实现以来的二十多年里,已经展示了几种在任何光谱区域生成频率梳的其他方法,每种方法都有其独特的特性。这种趋势引发了对定量评估新梳实现与理想梳的接近程度的需求,这一特性在本文中被称为梳状性。我们将简要回顾新型频率梳源这一非常活跃的领域,并针对具体应用描述最近开发的技术,用于定量评估新旧频率梳的关键参数。最后,我们将尝试勾勒出这个新兴研究领域的未来发展方向。
与免疫调节剂集成的癌症免疫疗法的可溶解的自锁微针斑块
Precision 3D打印技术和材料的进步具有戏剧性的改进的原型制作技术,从而使生物医学平台的世界广泛更快,更有效。[1]微分辨率3D打印机可以通过使用微铣削技术来制造高度复杂的质量可实现部分,而功能不可能提高。[2]因此,微尺度3D打印技术在生物医学领域中用于开发简单有效的透射药物输送平台(包括微针(MNS)),最近由于克服了克服传统MN的几何局限而引起了人们的注意。[3]由微米尺度聚合物针制成的可溶解的MN斑块是一种患者友好型的透皮药物输送系统,能够以最小的侵入性将活性化合物延伸到皮肤中。[4]然而,由于其锥形几何形状,常规MN并不能完全穿透皮肤,从而导致负载货物的递送精度较低,[5]对它们在药物领域中的临床应用和商业化产生了负面影响。[6]因此,已经开发出各种MN施加器,箭头微结构,微柱基和多步制造方法,以克服有限的Contectional MN的交付精度。[7]但是,这些方法的制造复杂性限制了它们在制药行业的批量生产和应用。因此,迫切需要开发一个简单且可实现的MN平台,能够准确交付负载的货物。在此,使用数字灯处理(DLP)基于芯片的图3D打印机用于制造一种可在皮肤组织中完全插入和锁定的新型自锁的MN,从而显着提高了Microuse递送精度,从而克服了传统MN的限制。制造简单性和质量增强性主要是在自我锁定的MN发展过程中主要集中在一个高度精确的透皮药物输送平台上。简而
重新配置能源流:能源网锁和区域在塑造电力基础设施中的作用
摘要 本文探讨了如何从区域视角提供一个富有洞察力的框架来研究能源转型中的机构分配,特别参考了重组电网以适应可再生能源扩张这一普遍存在的问题。理解这一领域的治理和机构需要一个概念框架,该框架可以捕捉基础设施的分层性质以及网络治理与其他政府领域之间的功能和地域不匹配。因此,本文采用了 Barry 的“技术区”概念,并用它来研究意大利两个地区的电网容量挑战和潜在解决方案。本文探讨了区域政府如何利用技术经济机会和固定因素在其行政区域内开发能源网络解决方案,并展示了区域级机构的性质(尽管是部分的)和范围。研究结果强调,区域不仅应被视为治理层,还应被视为激发创新的问题和行动场所。我们认为,虽然在所选案例中区域层面对网络基础设施的监管影响不大,但区域在直接或间接地使其领土可用于基础设施投资和调解潜在制约因素方面发挥着作用。