XiaoMi-AI文件搜索系统
World File Search System雷达成像

激光雷达图像——从简单快照到移动 3D 全景图
激光雷达图像 – 从简单快照到移动 3D 全景图 ALLAN I. CARSWELL,安大略省旺市 摘要 激光雷达图像现在为越来越多的应用提供了独特的 3D 成像功能。激光雷达广泛用于测量固体表面的位置、形状和结构,用于勘测、测绘、定位和车辆导航。激光雷达还能进行水下海洋和水文测量,以进行水深测量、水质研究和水下资源识别。此类激光雷达可在机载、水面和水下平台上操作。激光雷达也已成为越来越多大气测量的首选传感器,包括气象和空气质量研究。此外,激光雷达成像已用于各种空间应用,包括行星探索以及航天器着陆、对接和会合。本文概述了这些应用的亮点以及未来的趋势和方向。
征文通知
1. 自适应和可重构天线 2. 复杂介质 3. 电磁在生物医学中的应用 4. 电磁在纳米技术中的应用 5. 电磁教育 6. 电磁测量 7. 器件和电路的电磁建模 8. 电磁封装 9. 材料的电磁特性 10. 电磁理论 11. EMC/EMI/EMP 12. 有限方法 13. 频率选择表面 14. 高功率电磁学 15. 积分方程和混合方法 16. 有意 EMI 17. 逆散射和遥感 18. 超材料和超表面 19. 微波天线、组件和器件 20. 光电子学和光子学 21. 相控阵和自适应阵列 22. 等离子体和等离子体波相互作用 23. 印刷天线和共形天线 24. 雷达截面和渐近技术 25. 雷达成像 26. 射电天文学(包括SKA) 27. 随机和非线性电磁学 28. 反射天线 29. 毫米波和亚毫米波技术
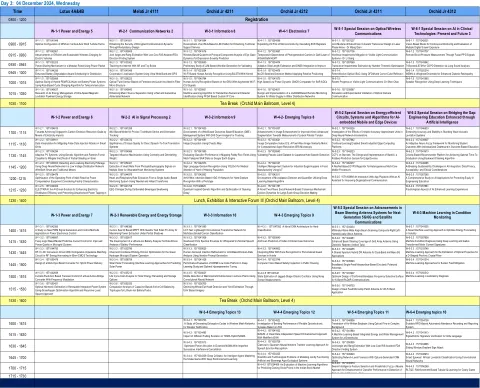
第3天:20024年12月4日,星期三
数字双胞胎方法,用于在复杂地形W-P.20 1571034363上安全着陆的数字型登陆:teahertz真空电子销售W-21 1571033985的铅笔梁电子光学系统:开发3kWhe电池储能系统的3KWH WATTEM WYMBACACITOR HYBRID储能WIREDENS WIRSTID WIRESTER WIRESTER WONSTINE W-P.22 157105624:便携式太阳能充电设备W-23 1571037449:分层型号堆叠:通过先进的合奏机器学习技术W-24 1571044011:使用智能人工照明系统W-P.25 1571056759:Mobile Rob 2 Feagle Black Interage Mobile Robots WW-P.24 1571044011通过高级合奏机器学习技术W-24 1571044011:Solar Greenhouse INLUMINANIT 1571049612:使用深度学习模型W-P.27 W-P.28 1571042716:FMCW雷达成像的优势和挑战,通过变化的子频段W-P.29 1571043662:探索人类活动的潜在,探索w-p.30 15710506050605060600600000100060000090060060000900000001T,天气信息聚合(SIGWA)W-31 1571033978:基于逆变器的电源系统W-32 1571050826:PointBi-fpn:对LIDAR 3D对象的PointPillars ticlection fluipection fter-divection

使用Keystone Transform从占用网格图中提取运动信息
考虑到OGM(占用网格图)的障碍及其在移动机器人技术的动态环境表示中的广泛使用,从连续的OGM中提取运动信息对于许多任务,例如SLAM(同时定位和映射)和DATMO(检测和跟踪移动对象)非常重要。在本文中,我们提出了一种基于信号变换的新型运动提取方法,称为S-KST(空间键石变换),以从连续的嘈杂OGMS进行运动检测和估计。它将雷达成像或运动补偿的KST扩展到1D空间案例(1DS-KST)和2D空间案例(2DS-KST),结合了关于移动障碍物的可能方向的多个假设。同时,还给出了基于Chirp Z-Transform(CZT)的2DS-KST的快速算法,其中包括五个步骤,即空间FFT,定向过滤,CZT,空间IFFT和最大功率检测器(MPD)合并及其计算复杂性与2D-FFT成正比。对点对象和扩展对象的仿真测试结果表明,Skst在非常嘈杂的环境中的子像素运动的提取方面具有良好的性能,尤其是对于那些缓慢移动的障碍物而言。

一款用户友好的耳机,用于基于雷达的静默语音识别
静默语音接口允许在没有声学语音信号的情况下进行语音通信。在这种应用中,使用在说话者脸上安装无线电天线的雷达感应可用作测量语音清晰度的非侵入式方式。这种方法的主要挑战之一是不同会话之间的差异性,主要是由于天线在说话者脸上的位置不同。为了减少这个影响因素的影响,我们开发了一种可穿戴耳机,它可以用柔性材料 3D 打印而成,重量仅为 69 克左右。为了进行评估,进行了一项基于雷达的单词识别实验,其中五位说话者在多个会话中录制了语音语料库,交替使用耳机和双面胶带将天线贴在脸上。通过使用双向长短期记忆网络进行分类,使用耳机和胶带分别获得了 76.50% 和 68.18% 的平均会话间单词准确率。这表明,使用耳机的天线(重新)定位精度并不比使用双面胶带的差,同时还具有其他优势。索引词:静音语音接口、可穿戴耳机、BiLSTM、雷达成像、语音相关生物信号
“SAR数据处理及其应用”
引言 遥感是一种利用卫星或飞机观察地球表面各种特征的技术。随着太空传感器的进步,遥感已成为探测地球表面各种特征的有效方法。光学红外 (OIR) 遥感主要用于使用 OIR 传感器对地球表面进行成像。然而,OIR 传感器受到阳光可用性和大气条件(如雾霾和云层)干扰的限制。因此,使用微波或雷达遥感对于对地球表面进行成像非常有用。通过合成孔径雷达 (SAR) 系统进行的雷达成像扩展了微波遥感技术在各种应用中的应用。要理解 SAR 图像,需要了解电磁波与地球表面特征相互作用背后的物理现象。SAR 数据处理也不同于光学数据处理,因为它涉及许多信号处理技术。SAR 数据处理使用脉冲压缩技术、线性调频 (LFM) 概念、距离和多普勒信息以及各种其他 SAR 参数。距离-多普勒算法 (RDA) 是一种常用的聚焦 SAR 数据的技术。由于 SAR 是一种测距仪器,因此与光学图像相比,SAR 图像中的几何失真更为普遍。因此,需要使用 SAR 地理定位、地理编码和正射校正技术进行几何校正。SAR 地理定位也与光学传感器有很大不同,因为它使用距离和多普勒方程来对目标进行地理定位。
1724811440.pdf
月船三号任务:月船三号对月球南极的探索标志着印度太空事业的新纪元。印度成功在月球南极附近软着陆,这是印度的民族自豪感,使该国成为第一个在如此接近月球南极的地方着陆航天器这一非凡壮举的国家。火星轨道飞行器任务(Mangalyaan):该任务使印度成为第一个登陆火星的亚洲国家,也是继俄罗斯航天局、美国国家航空航天局 (NASA) 和欧洲航天局之后世界上第四个登陆火星的国家。Aditya-L1:这是印度第一个太空天文台级太阳任务,从 150 万公里的相当远的距离研究太阳。运载火箭发展计划:极地卫星运载火箭 (PSLV)、地球同步卫星运载火箭 (GSLV) 和下一代 GSLV Mark-III 运载火箭任务是运载火箭发展计划的一部分。地球观测计划:它包括尖端的印度遥感 (IRS) 卫星,例如 Resourcesat、Cartosat、Oceansat、雷达成像卫星、地理成像卫星和天气/气候卫星,例如 INSAT-3DR 任务。IN-SPACE:它的发射是为了为私营公司使用印度空间基础设施提供公平的竞争环境。新空间印度有限公司 (NSIL):它是印度空间研究组织的商业部门,其主要目的是使印度企业能够参与高科技空间相关业务。印度空间研究组织的未来空间计划:
战斗识别
回报。使用武器需要准确识别敌方目标。美国空军增强型识别和传感激光雷达 (ERASER) ATD 旨在通过使用主动激光技术改进空中和地面目标的机载识别过程。该项目将集中于将 ERASER 激光和信号处理技术集成到试验机上进行飞行演示。ERASER 提供的目标识别将补充作战人员整体识别套件中的其他识别源。ERASER 将结合为地面目标识别开发的 2D 激光成像技术和 CID 算法。美国空军还将使用合成孔径和高距离分辨率技术改进空对地雷达成像 (AGRI) 战术雷达识别能力。海军打算开发一种利用多种目标信息源(合作和非合作)的复合 CID 能力。除了空军正在实施的 ERASER 和 AGRI 方法外,还有针对其他传感器模式(被动和主动)的相关自动目标识别 (ATR) 计划正在研究中;特别是替代合成孔径雷达 (SAR) ATR、特定发射器识别、精密电子支持测量和固态激光振动传感。美国海军非合作空中目标识别计划将演示基于多普勒的成像过程,以提供空中目标类别估计。美国海军沿海监视/移动目标识别计划将提供小型飞机成像的演示。美国海军激光 CID 项目使用激光测振、高距离分辨率 1D 剖面、2D 轮廓提取和依赖于优化激光源照射时独特目标反射率特征的技术。根据此 DTO,表面目标 ID 的退出标准是声明概率为 85%,识别置信概率为 98%。
战斗识别
回报。使用武器需要确定敌方身份。美国空军增强型识别和传感激光雷达 (ERASER) ATD 旨在通过使用主动激光技术改进空中和地面目标的机载识别过程。该计划的努力将集中在将 ERASER 激光和信号处理技术集成到试验机上进行飞行演示。ERASER 提供的目标 ID 将补充来自作战人员整体 ID 套件的其他 ID 源。ERASER 将结合为地面目标 ID 开发的 2D 激光成像技术和 CID 算法。美国空军还将使用合成孔径和高距离分辨率技术来提高空对地雷达成像 (AGRI) 战术雷达 ID 能力。海军打算开发一种综合 CID 能力,利用多种目标信息源(合作和非合作)。除了空军正在实施的 ERASER 和 AGRI 方法外,还有针对其他传感器模式(被动和主动)的相关自动目标识别 (ATR) 程序正在研究中;特别是替代合成孔径雷达 (SAR) ATR、特定发射器识别、精密电子支持测量和固态激光振动传感。美国海军非合作空中目标识别计划将演示基于多普勒的成像过程,以提供空中目标类别估计。美国海军沿海监视/移动目标识别计划将提供小型舰艇成像的演示。美国海军激光 CID 项目采用激光测振、高距离分辨率 1D 剖面、2D 轮廓提取以及依赖于优化激光源照射时独特目标反射率特性的技术。根据此 DTO,表面目标 ID 的退出标准是声明概率为 85%,识别置信概率为 98%。

Hélène SPORTOUCHE 论文
这项博士研究工作是在 Télécom ParisTech(巴黎)的 TSI 部门和 Thales Communications(马西)的 IMINT 部门之间建立的 CIFRE 协议框架内进行的。这篇论文让我有机会探索实验室研究的世界和商业世界,从而让我获得双重经历,极大地丰富了作为员工的专业水平。我要感谢这三年来陪伴我度过这场伟大的科学和人类冒险的所有人。我要特别感谢我的论文导师、巴黎高科电信教授 Florence Tupin 女士和我的工业经理、泰雷兹通信公司工程师 Léonard Denise 先生,他们在这三年里对我进行了指导。我很高兴与他们合作,并非常感谢他们的优质监督、长期投资、宝贵建议、倾听技巧、友善和随时待命。在此向他们表示感谢,感谢他们在本论文的不同阶段给予我的帮助。我还要感谢他们在令人兴奋的遥感、光学和雷达成像领域所提供的卓越教学,以及我们围绕这些主题进行的所有富有成效和激励人心的对话。我还要感谢巴黎高科电信教授 Jean-Marie Nicolas 先生,他发起了这个博士项目,并参与了这项工作的每个关键方向。我热烈感谢他的参与、他的善意以及我们的多次交流,总是非常丰富。我还要感谢我的辩护评审团的所有成员。非常诚挚地感谢格勒诺布尔INP教授Jocelyn Chanussot先生和波尔多ENITA教授Christian Germain先生同意报告本论文,他们的建设性言论和开明的意见极大地促进了论文的进展。这项工作和手稿的定稿。我非常热烈地感谢马赛中央理工学院教授 Philippe Réfrégier 先生担任我的答辩评审团主席,我对他在菲涅尔研究所硕士实习期间给我的明智建议表示衷心的感谢,并且他鼓励我在实习结束时写一篇论文。我还要感谢评审团的评审员、CNES 工程师 Jordi Inglada 先生和 ESGT 勒芒讲师 Élisabeth Simonetto 女士,感谢他们对这项研究工作的关注和兴趣。我还要感谢巴黎南理工大学教授 Sylvie Le Hégarat-Mascle 女士、LIP6 / UPMC 讲师 Séverine Dubuisson 女士以及巴黎高科电信教授 Isabelle Bloch 女士,他们是我的评审团成员