机构名称:
¥ 1.0
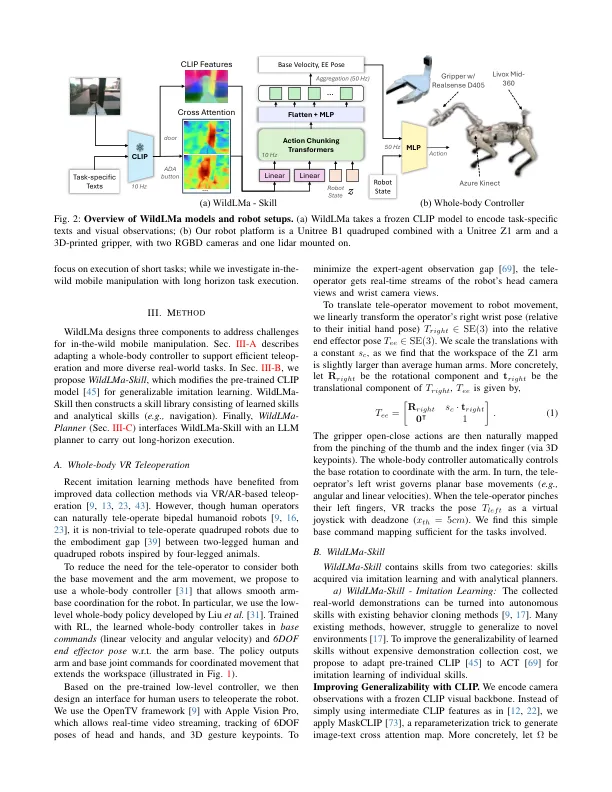
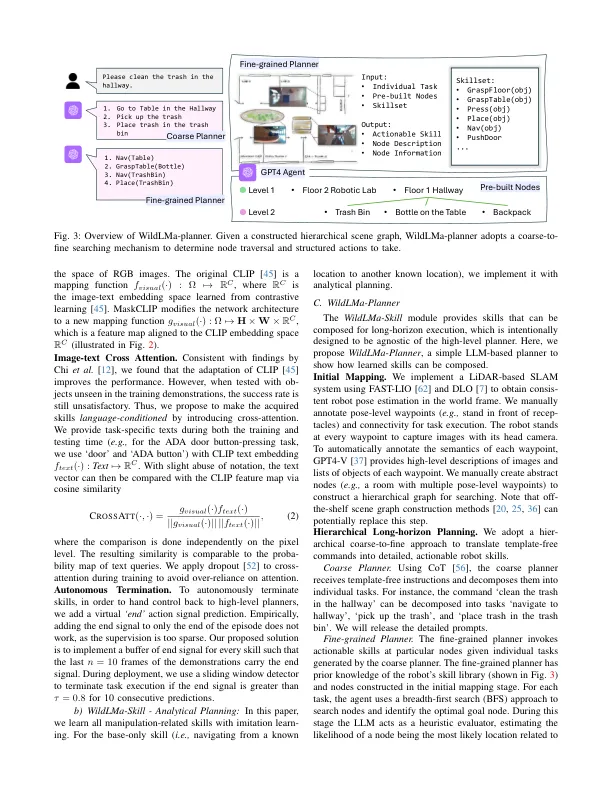
摘要 - “野外”移动操作旨在在不同的现实世界环境中部署机器人,这要求机器人具有(1)具有跨对象配置的技能; (2)能够在各种环境中进行长马任务执行; (3)在接地之外执行复杂的操作。用操纵器的四倍的机器人有望扩展工作空间并实现强大的运动,但是现有的结果并未调查这种能力。本文提出了Wildlma具有三个组成部分来解决以下问题的三个组合:(1)为支持VR的全身远程操作和遍历性,对学识渊博的低级控制器的适应; (2)Wildlma-Skill - 通过模仿学习或启发式方法获得的可推广的视觉运动技能的库以及(3)Wildlma-Planner,这是一种学习技能的界面,允许LLM Planners协调长途任务的技能。,我们通过仅使用数十种示范来实现与现有RL基准相比,实现高质量培训数据的重要性。Wildlma利用剪辑进行语言条件模仿学习,从经验上概括到在培训演示中看不见的对象。除了进行广泛的定量评估外,我们定性地展示了实用的机器人应用,例如清理大学走廊或室外地形的垃圾,操作清晰的物体以及在书架上重新安排物品。
Wildlma:野生中的长范围内部操作
主要关键词


相关文件推荐