机构名称:
¥ 1.0
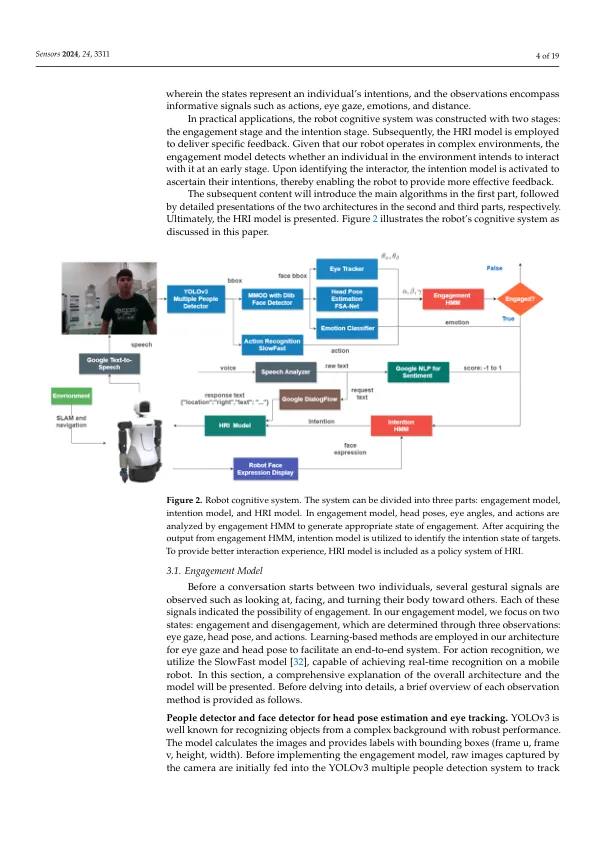
摘要:这项研究开发了一个全面的机器人系统,称为机器人认知系统,用于复杂的环境,整合了三个模型:参与模型,意图模型和人类 - 机器人相互作用(HRI)模型。该系统旨在通过使机器人准确地检测人类的行为,意图和情感来增强HRI的自然性和舒适性。一种新颖的双臂移动机器人MOBI旨在证明该系统的功效。参与模型利用眼睛凝视,头部姿势和动作识别来确定相互作用启动的合适力矩,以解决潜在的眼神接触焦虑。意图模型采用情感分析和情感分类来推断互动者的意图。与Google DialogFlow集成的HRI模型,根据用户反馈促进了适当的机器人响应。该系统的性能在零售环境方案中得到了验证,这表明了它可以改善HRIS用户体验的潜力。
实施人类的参与检测 -
主要关键词


相关文件推荐