
机构名称:
¥ 1.0
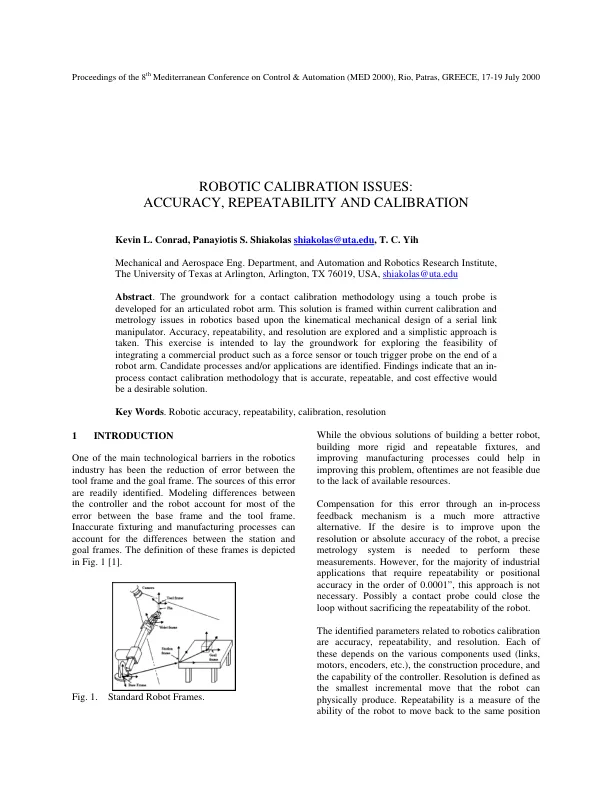
机器人校准问题:准确性、可重复性和校准 Kevin L. Conrad、Panayiotis S. Shiakolas shiakolas@uta.edu、T. C. Yih 机械和航空航天工程。德克萨斯大学阿灵顿分校自动化与机器人研究所,美国德克萨斯州阿灵顿 76019,shiakolas@uta.edu 摘要。为关节式机器人手臂开发了使用接触式探头的接触校准方法的基础。该解决方案是在基于串行连杆机械手的运动机械设计的机器人当前校准和计量问题中提出的。探索了准确性、可重复性和分辨率,并采取了一种简单的方法。本练习旨在为探索在机器人手臂末端集成商业产品(如力传感器或触发式探头)的可行性奠定基础。确定候选流程和/或应用程序。研究结果表明,准确、可重复且经济高效的在线接触校准方法将是一种理想的解决方案。关键词。机器人精度、重复性、校准、分辨率 1 简介 机器人行业的主要技术障碍之一是减少工具框架和目标框架之间的误差。这种错误的来源很容易确定。控制器和机器人之间的建模差异是造成基座框架和工具框架之间大部分误差的原因。不准确的夹具和制造工艺可以解释工位框架和目标框架之间的差异。这些框架的定义如图所示。1 [1]。
准确度、重复性和校准
主要关键词


相关文件推荐



























