XiaoMi-AI文件搜索系统
World File Search System中间件
Qibolab:一个开源的混合量子操作系统
我们介绍了 Qibolab,一个与 Qibo 量子计算中间件框架集成的量子硬件控制开源软件库。Qibolab 提供在定制的自托管量子硬件平台上自动执行基于电路的算法所需的软件层。我们引入了一组对象,旨在通过面向脉冲的仪器、转换器和优化算法驱动程序提供对量子控制的编程访问。Qibolab 使实验人员和开发人员能够将硬件实现的所有复杂方面委托给库,以便他们能够以可扩展的与硬件无关的方式标准化量子计算算法的部署,使用超导量子比特作为第一个正式支持的量子技术。我们首先描述库中所有组件的状态,然后展示超导量子比特平台的控制设置示例。最后,我们展示与基于电路的算法相关的成功应用结果。
将 PDM 和 ERP 系统与 IBM 制造发布管理集成
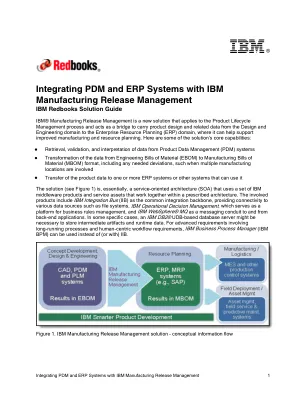
该解决方案(参见图 1)本质上是一种面向服务的架构 (SOA),它使用一组 IBM 中间件产品和服务资产,这些产品和服务资产在规定的架构内协同工作。所涉及的产品包括 IBM Integration Bus (IIB) 作为通用集成主干,提供与各种数据源(如文件系统)的连接、IBM Operational Decision Management(用作业务规则管理平台)和 IBM WebSphere® MQ(作为往返后端应用程序的消息传递管道)。在某些特定情况下,可能需要基于 IBM DB2® UDB 的数据库服务器来存储中间工件和运行时数据。对于涉及长期运行流程和以人为中心的工作流要求的高级要求,可以使用 IBM Business Process Manager (IBM BPM) 代替(或与)IIB 一起使用。

Qibolab:一个开源的混合量子操作系统
我们介绍了 Qibolab,一个与 Qibo 量子计算中间件框架集成的量子硬件控制开源软件库。Qibolab 提供在定制的自托管量子硬件平台上自动执行基于电路的算法所需的软件层。我们引入了一组对象,旨在通过面向脉冲的仪器、转换器和优化算法驱动程序提供对量子控制的编程访问。Qibolab 使实验人员和开发人员能够将硬件实现的所有复杂方面委托给库,以便他们能够以可扩展的与硬件无关的方式标准化量子计算算法的部署,使用超导量子比特作为第一个正式支持的量子技术。我们首先描述库中所有组件的状态,然后展示超导量子比特平台的控制设置示例。最后,我们展示与基于电路的算法相关的成功应用结果。

技术设计报告:Ouxt Polaris 2025
1)易于携带:足够小,可以由一个大手提箱中的一个人运输2)传感器兼容性:具有足够的浮力余量,可以携带与WAM-V相同的传感器,WAM-V大约是汽车的大小。3)执行器的兼容性:在执行器布局方面与WAM-V兼容。4)软件兼容性:嵌入式中间件和计算机配置,以允许与WAM-V一起使用相同的软件,而Mini-V Ouxt Polaris正在竞争Minime Robotx Challenge以及Roboboat,以及它的最大要求是,Mini-V是单独使用WAM-V的兼容机,这需要一日供大会供大会进行组合。Mini-V可以由一个人运输并在几分钟内组装,这使其成为非常便宜的硬件。最大的组件,即船体,可以折叠以进行巨大的紧凑存储。船只的通信网络也基于以太网,该协议与WAM-V统一。

2023 年目录答辩
Compellio 是一家在卢森堡注册成立的深度科技公司。Compellio 及其合作伙伴是欧洲首批在生产中部署区块链和物联网解决方案的公司之一,旨在提供产品/资产防伪服务、用于审计/合规目的的可信信息可追溯性以及用于资产/产品状态监控的动态分析。Compellio 的注册软件是一种中间件应用程序,它将传统 IT 系统连接到多个公共或私有区块链,以确保数据的不变性和可追溯性、严格的隐私控制、可信的数据互操作性和安全的数据交换。我们的目标是使公共部门和国防相关机构能够为其数字系统、基础设施和数据实施严格、现代的网络安全保护。此外,我们希望支持机构使用符合安全软件开发标准的软件,为软件生产商和机构创建可信的自我认证表格,并允许政府建立可审计的软件供应链。
实现模块化自主反馈
迄今为止,自主工作流程的演示 [8–11] 都是基于单个实验室中的单个仪器。[12] 自主实验的这种有限范围植根于实验室中间件,其中实验室硬件的编排发生在单个计算机-仪器配对中。[11] 一些值得注意的例子包括 ChemOS,[12] 原则上它能够通过 ROS [13] 后端在不同机器之间分配工作。然而,这种无可争议的强大软件确实施加了复杂的软件依赖关系,并且随着实验平台范围的增加而增长。虽然商业软件(例如 National Instruments 的 LabView)可以促进仪器自动化编程,但它无法满足 MAP 社区的需求,因为它与版本控制软件的开源开发不兼容。在设备没有(官方)应用程序编程接口 (API) 的情况下,或者仪器的软件驱动程序必须不断发展

AC ROS:针对机器人的保证案例驱动适应...
实现自适应行为的网络物理系统(例如自主机器人)需要确保在运行时适应性调整过程中始终满足需求。机器人操作系统 (ROS) 是机器人系统的中间件基础设施,广泛应用于研究和工业应用。然而,ROS 本身并不能保证自适应行为。本文介绍了 ACROS,它通过在运行时使用保证案例模型来管理基于 ROS 的系统的自适应操作,从而填补了这一空白。保证案例提供了系统满足需求的结构化论据,并且可以使用目标结构化符号 (GSN) 模型以图形方式指定。ACROS 使用 GSN 模型来实例化基于 ROS 的 MAPE-K 框架,该框架又在运行时使用这些模型来确保系统行为在适应性调整过程中始终符合需求。在本研究中,ACROS 在 1:5 比例的自动驾驶汽车 EvoRally 上实施和测试。

迈向jacamo-rest:一种面向资源的抽象,用于管理多代理系统∗†
摘要。多代理的编程(MAOP)范式为模型和实施代理人及其组织和环境提供了抽象。近年来,研究人员已开始探索MAOP和面向资源的Web体系结构(REST)的整合。本文通过在Jacamo-Rest上展示了一项持续的工作,这是一项持续的研究,这是一种基于资源的基于资源的网络编程平台JACAMO的抽象。jacamo- reth将多代理系统(MAS)互操作性达到新级别,不仅可以与万维网的服务或应用程序进行交互,还可以通过其他应用程序在其规范中进行管理和更新。要将开发人员界面添加到适合Web的Jacamo中,我们提供了一个关于MAOP规范实体管理的新颖概念观点。我们将其作为编程接口应用程序的中间件进行了测试,该应用程序提供了现代软件工程设施,例如连续部署和MAS的迭代软件开发。

上下文感知系统:文献综述和分类
如今,许多期刊和会议发表了与上下文感知系统有关的文章,表明许多研究人员的兴趣。因此,本文的目的是审查在期刊上发表的作品,提出一个新的分类框架,以探索上下文感知系统的新作品,并探索分类框架的每个功能。本文使用关键字索引和文章标题搜索对2000年至2007年的上下文感知系统的文献综述。分类框架是基于上下文感知系统的架构开发的,该系统由以下五个外行组成:概念和研究层,网络层,中间件层,应用程序层和用户基础层。文章是根据分类框架对文章进行分类的。本文允许研究人员提取几个对实施上下文意识系统很重要的经验教训。Crown版权所有2008年由Elsevier Ltd.发布的所有权利保留。
企业测试管理标准 - 联邦学生援助
2.2 2009 年 10 月 2 日 附录 A:添加 NIST。附录 B:添加 NIST、中间件、渗透测试和基于风险的测试。附录 E:在所有模板的开头和模板文件名中添加模板版本号。添加新模板 23(灾难恢复测试就绪评审文档)。在附录 D 中:在基础设施/应用程序测试部分添加有关测试要求的指导。更新灾难恢复部分。添加企业测试团队和业务部门负责的项目。添加有关 DR TRR 的部分/列表。将基于风险的测试用例确定添加到第 20 节。添加声明,有关渗透测试和漏洞扫描的政策将发布在 FSA 门户网站上。用 ESB 替换所有 EAI 实例。第 2.3 节:添加 EDSS SA-3 咨询声明。添加新的第 2.4 节(预算考虑)。第 3.4.1.1 节:添加 FSA 测试经理在 PRR 备忘录上提供签字认可签名的责任